
1 机器人坐标系的建立
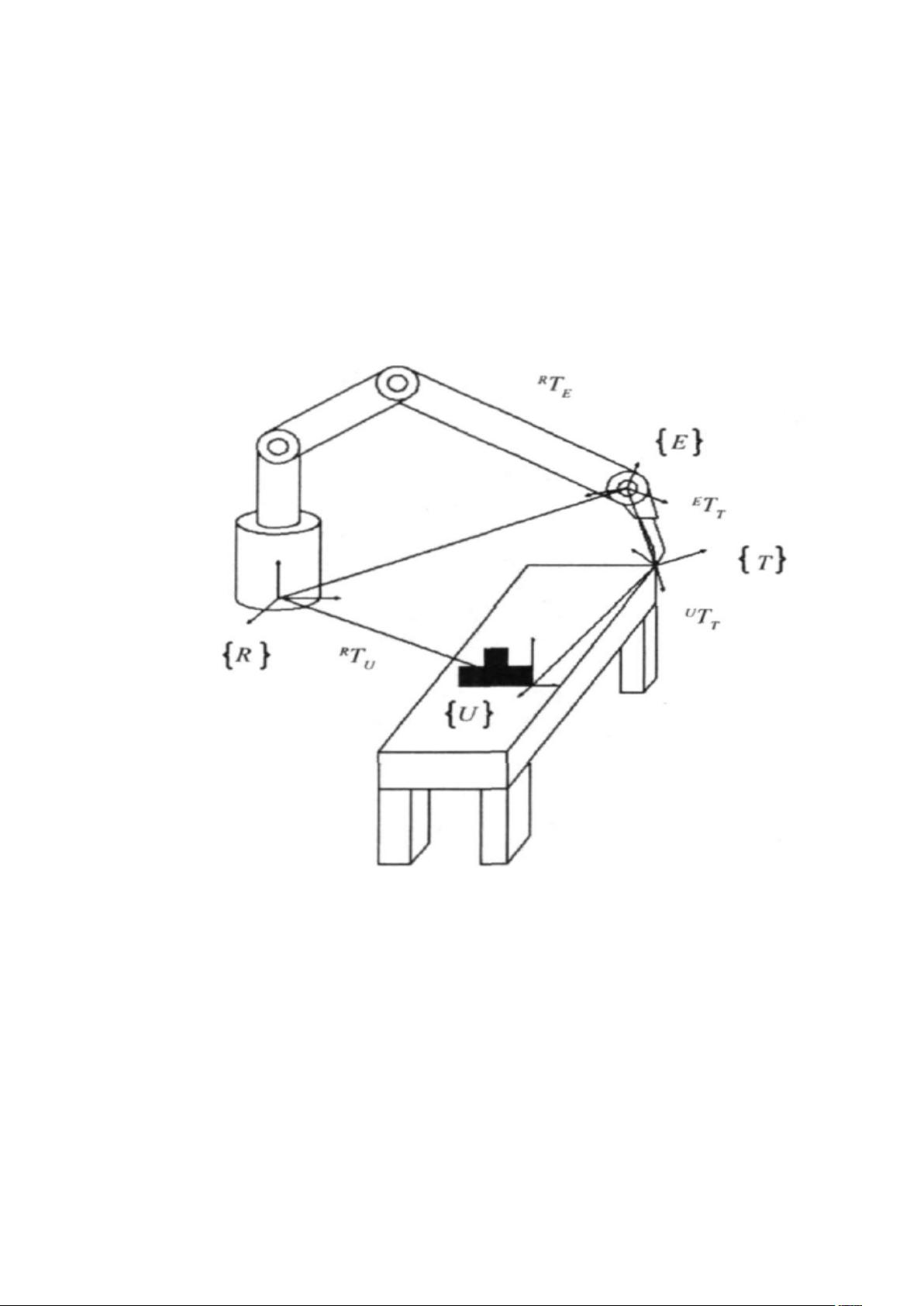
ABB 工业机器人机器人上的坐标系可以分成四类: 机器人基准坐标系 {R },
机器人末端坐标系 {E }, 工具坐标系{T }, 工件坐标系 { U }。机器人基坐标系
是一个不可设置的缺省的坐标系, 固结在机器人机座上, 它是机器人运动学分析
的基本参考系。同时, 机器人基坐标系还可用作通用坐标系, 作为用户坐标系的
参考位置。机器人末端坐标系, 即与机器人最后一个连杆固结的坐标系, 原点位
于机器人末端法兰盘中心。工具坐标系用来定义 TCP(tool center point) 的位置及
工具的姿态。工件坐标系是用户在工作空间中自定义的坐标系, 是程序中记录的
所有位置的参考坐标系。本文所说的工具坐标系标定指的是工具坐标系相对于末
端坐标系的位姿参数的确定, 即坐标变换矩阵的确定。
其中机器人工具坐标系的标定就是求出齐次转换矩阵
E
T
T
,工件坐标系的标
定就是求出齐次转换矩阵
R
U
T
。
2.机器人坐标系标定的原理和方法
2.1 工具坐标系的标定
ABB 机器人是一个具有 6 自由度的先进设备。ABB 机器人工作时,在机器
人的末端必须固定工具,根据工作的内容和要求的不同,需要选择合适的工具,
在更换工具时,必须重新标定 ABB 机器人的工具坐标系。机器人的工具坐标系
由其末端坐标系与工具的位置和姿态决定。机器人进行实际工作前,首先要把工
具坐标系相对于末端坐标系的转换矩阵信息计算出来,传送到机器人控制器中。
机器人工具坐标系是由其末端坐标系决定的,若没有定义工具坐标系,则机器


剩余16页未读,继续阅读
资源评论


猫一样的女子245
- 粉丝: 234
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 时间戳同步方式讲解,message-filter 互斥锁 以及融合队列
- docker-compose搭建一整套前、后端分离系统部署涉及到mysql5.7、mysql8.0,nginx1.23、redis6、vue、jar包(springboot)
- 基于自监督三维语义表示学习的视觉语言导航
- sqlcipher连接工具(windows)
- 华为AP8050DN胖固件
- OfficeAI助手是一款免费的智能AI办公工具软件,专为MicrosoftOffice和WPS用户打造
- C语言从0到1教程包含源码和案例
- 台达DVP PLC与多台变频器通讯编程详解:昆仑通态接线方式与设置指南,实现频率设定、启停控制和状态读取指示功能,台达DVP PLC与3台台达VFD-M变频器通讯程序 实现频率设定、启停控制与状态读取
- 资源获取工具分享(轻松获取文档、小说、音乐、视频资源)
- vue3-element-template
- 基于go语言的GUI框架fyne开发的俄罗斯方块游戏
- 电子商务_前后端分离_管理系统_毕业设计_1740825497.zip
- 电子科技_本科论文_LaTex模板_1740825154.zip
- 电子科技大学本科毕设论文_LaTeX模板_1740824992.zip
- 计算机电子商城管理技术_用户购物体验提升系统_1740825257.zip
- 电子桌牌项目.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


