Lie-theory -cheat-sheet.pdf机器人学李群李代数理论公式表
需积分: 1 154 浏览量
2023-01-07
23:31:29
上传
评论
收藏 259KB PDF 举报

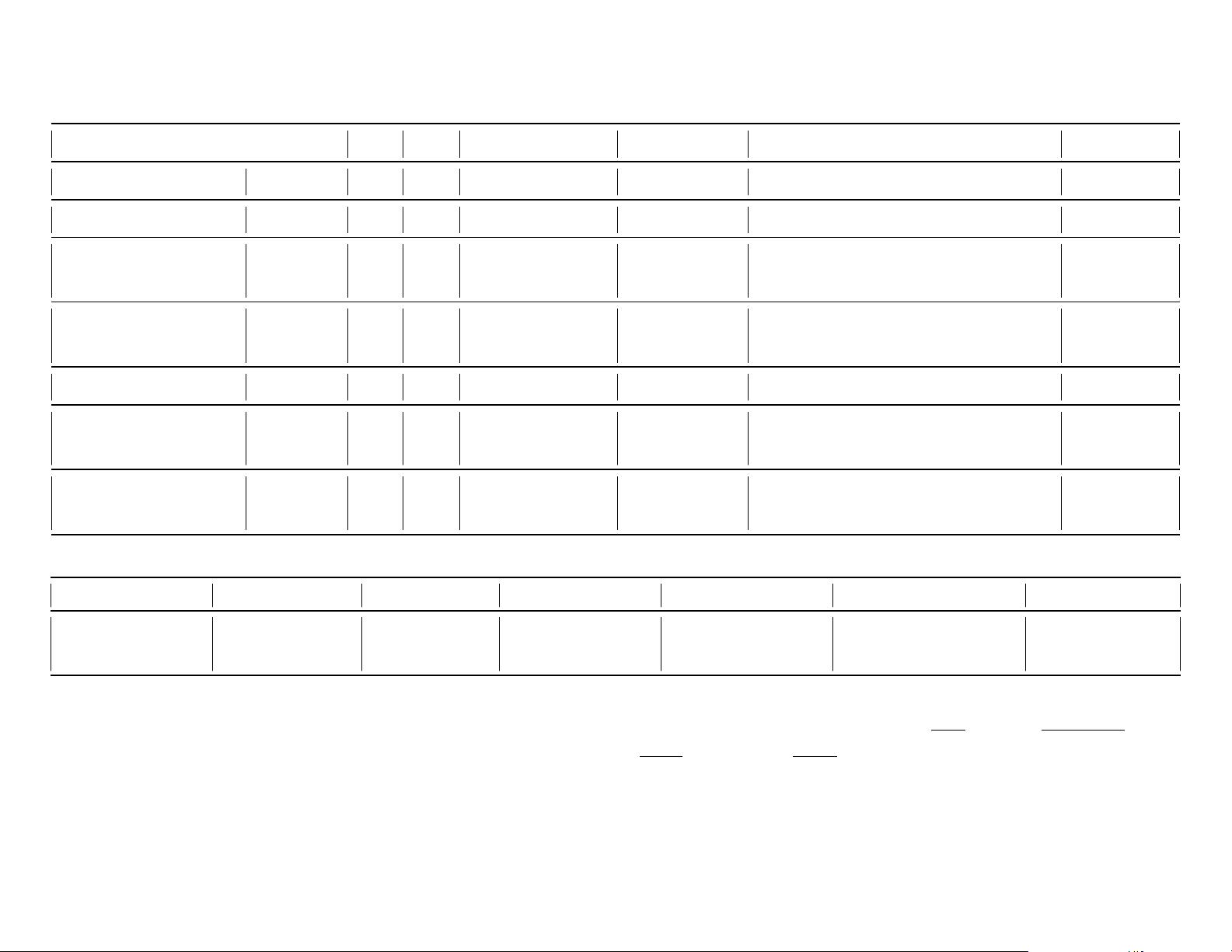
Lie theory cheat sheet
Lie group M, ◦ size dim X ∈ M Constraint τ
∧
∈ m τ ∈ R
m
Vector n-D R
n
, + n n v ∈ R
n
v − v = 0 v ∈ R
n
v ∈ R
n
Complex number S
1
, · 2 1 z ∈ C z
∗
z = 1 iθ ∈ iR θ ∈ R
2D Rotation SO(2), · 4 1 R R
>
R = I [θ]
×
=
0 −θ
θ 0
∈ so(2) θ ∈ R
2D Rigid Motion SE(2), · 9 3 M =
R t
0 1
R
>
R = I
[θ]
×
ρ
0 0
∈se(2)
ρ
θ
∈ R
3
Quaternion S
3
, · 4 3 q ∈ H q
∗
q = 1 θ/2 ∈ H
p
θ ∈ R
3
3D Rotation SO(3), · 9 3 R R
>
R = I [θ]
×
=
0 −θ
z
θ
y
θ
z
0 −θ
x
−θ
y
θ
x
0
∈ so(3) θ ∈ R
3
3D Rigid Motion SE(3), · 16 6 M =
R t
0 1
R
>
R = I
[θ]
×
ρ
0 0
∈se(3)
ρ
θ
∈ R
6
Operation Inverse Compose Exp Log Right- ⊕ Right-
Right Jacobians J
χ
−1
χ
= −Ad
χ
J
χ◦γ
χ
= Ad
γ
−1
J
χ◦γ
γ
= I
J
Exp(τ )
τ
= J
r
(τ ) J
Log(χ)
χ
= J
−1
r
(τ )
J
χ⊕τ
χ
= (Ad
Exp(τ )
)
−1
J
χ⊕τ
τ
= J
r
(τ )
J
γχ
χ
= −J
−1
l
(τ )
J
γχ
τ
= J
−1
r
(τ )
Note: In accordance to manif implementation, all Jacobians in this document are right Jacobians, whose definition reads:
δf(X)
δX
= lim
ϕ→0
f(X⊕ϕ)f (X)
ϕ
.
However, notice that one can relate the left- and right- Jacobians with the Adjoint,
E
∂f(X )
∂X
Ad
X
= Ad
f(X )
X
∂f(X )
∂X
, see [1] Eq. (46).
[1] J. Sol`a, J. Deray, and D. Atchuthan, “A micro Lie theory for state estimation in robotics,” Tech. Rep. IRI-TR-18-01, Institut de Rob`otica i Inform`atica Industrial,
Barcelona, 2018. Available at arxiv.org/abs/1812.01537.
c
2020 J. Deray and J. Sol`a
Available at github.com/artivis/manif
资源评论














