RelationNet++: Bridging Visual Representations for Object Detect
192 浏览量
2023-11-25
15:53:20
上传
评论
收藏 611KB PDF 举报

RelationNet++: Bridging Visual Representations for
Object Detection via Transformer Decoder
Cheng Chi
∗
Institute of Automation, CAS
chicheng15@mails.ucas.ac.cn
Fangyun Wei
Microsoft Research Asia
fawe@microsoft.com
Han Hu
Microsoft Research Asia
hanhu@microsoft.com
Abstract
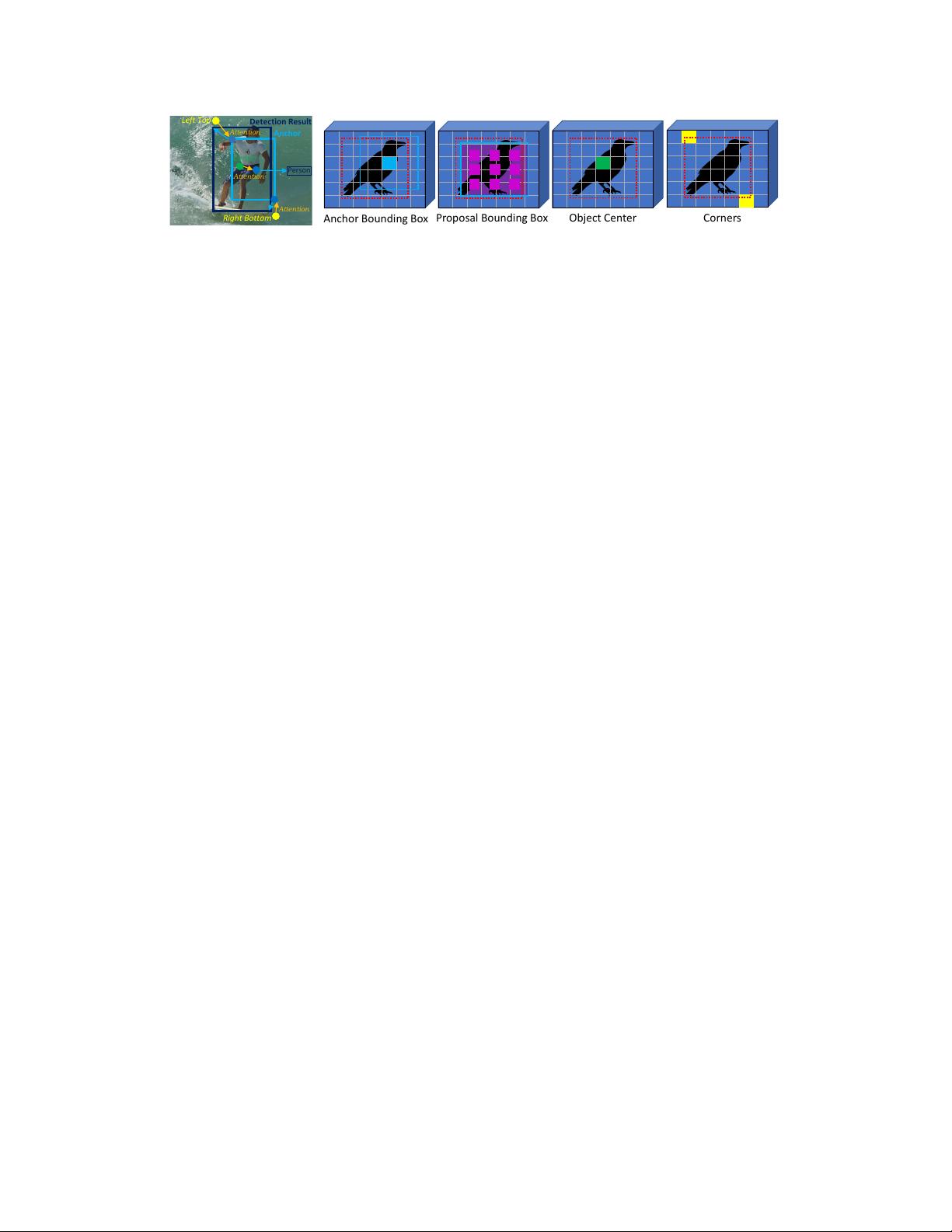
Existing object detection frameworks are usually built on a single format of ob-
ject/part representation, i.e., anchor/proposal rectangle boxes in RetinaNet and
Faster R-CNN, center points in FCOS and RepPoints, and corner points in Corner-
Net. While these different representations usually drive the frameworks to perform
well in different aspects, e.g., better classification or finer localization, it is in gen-
eral difficult to combine these representations in a single framework to make good
use of each strength, due to the heterogeneous or non-grid feature extraction by
different representations. This paper presents an attention-based decoder module
similar as that in Transformer [
31
] to bridge other representations into a typical
object detector built on a single representation format, in an end-to-end fashion.
The other representations act as a set of key instances to strengthen the main query
representation features in the vanilla detectors. Novel techniques are proposed
towards efficient computation of the decoder module, including a key sampling
approach and a shared location embedding approach. The proposed module is
named bridging visual representations (BVR). It can perform in-place and we
demonstrate its broad effectiveness in bridging other representations into prevalent
object detection frameworks, including RetinaNet, Faster R-CNN, FCOS and ATSS,
where about
1.5 ∼ 3.0
AP improvements are achieved. In particular, we improve a
state-of-the-art framework with a strong backbone by about
2.0
AP, reaching
52.7
AP on COCO test-dev. The resulting network is named RelationNet++. The code
is available at https://github.com/microsoft/RelationNet2.
1 Introduction
Object detection is a vital problem in computer vision that many visual applications build on. While
there have been numerous approaches towards solving this problem, they usually leverage a single
visual representation format. For example, most object detection frameworks [
9
,
8
,
24
,
18
] utilize
the rectangle box to represent object hypotheses in all intermediate stages. Recently, there have also
been some frameworks adopting points to represent an object hypothesis, e.g., center point in Center-
Net [
38
] and FCOS [
29
], point set in RepPoints [
35
,
36
,
3
] and PSN [
34
]. In contrast to representing
whole objects, some keypoint-based methods, e.g., CornerNet [
15
], leverage part representations of
corner points to compose an object. In general, different representation methods usually steer the
detectors to perform well in different aspects. For example, the bounding box representation is better
aligned with annotation formats for object detection. The center representation avoids the need for an
anchoring design and is usually friendly to small objects. The corner representation is usually more
accurate for finer localization.
It is natural to raise a question: could we combine these representations into a single framework to
make good use of each strength? Noticing that different representations and their feature extractions
∗
The work is done when Cheng Chi is an intern at Microsoft Research Asia.
34th Conference on Neural Information Processing Systems (NeurIPS 2020), Vancouver, Canada.

剩余10页未读,继续阅读
资源评论













