DEFORMABLE DETR: DEFORMABLE TRANSFORMERS FOR END-TO-END OBJECT D
22 浏览量
2023-11-25
15:52:06
上传
评论
收藏 4.25MB PDF 举报


Published as a conference paper at ICLR 2021
DEFORMABLE DETR: DEFORMABLE TRANSFORMERS
FOR END-TO-END OBJECT DETECTION
Xizhou Zhu
1∗
, Weijie Su
2∗‡
, Lewei Lu
1
, Bin Li
2
, Xiaogang Wang
1,3
, Jifeng Dai
1†
1
SenseTime Research
2
University of Science and Technology of China
3
The Chinese University of Hong Kong
{zhuwalter,luotto,daijifeng}@sensetime.com
jackroos@mail.ustc.edu.cn, binli@ustc.edu.cn
xgwang@ee.cuhk.edu.hk
ABSTRACT
DETR has been recently proposed to eliminate the need for many hand-designed
components in object detection while demonstrating good performance. However,
it suffers from slow convergence and limited feature spatial resolution, due to the
limitation of Transformer attention modules in processing image feature maps. To
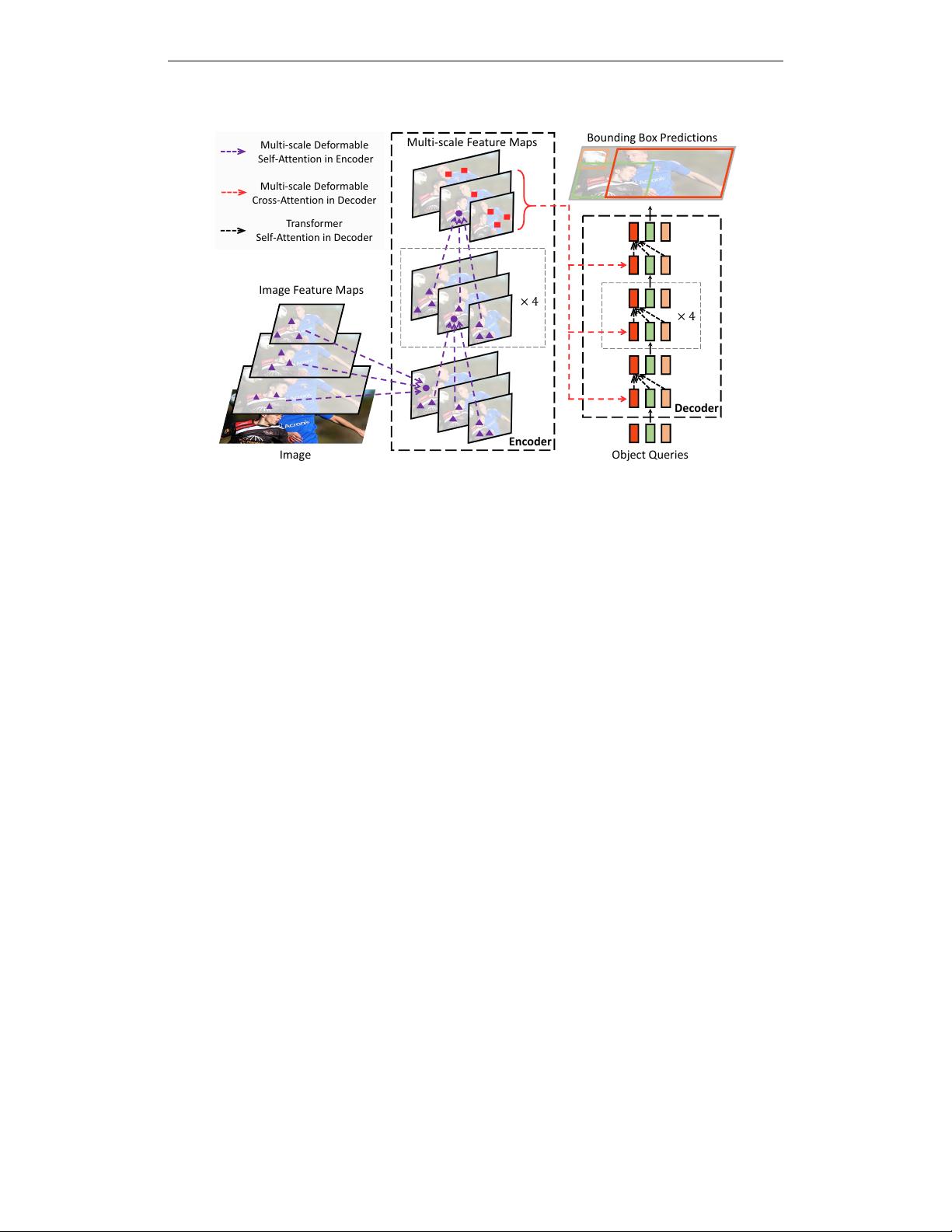
mitigate these issues, we proposed Deformable DETR, whose attention modules
only attend to a small set of key sampling points around a reference. Deformable
DETR can achieve better performance than DETR (especially on small objects)
with 10× less training epochs. Extensive experiments on the COCO benchmark
demonstrate the effectiveness of our approach. Code is released at https://
github.com/fundamentalvision/Deformable-DETR.
1 INTRODUCTION
Modern object detectors employ many hand-crafted components (Liu et al., 2020), e.g., anchor gen-
eration, rule-based training target assignment, non-maximum suppression (NMS) post-processing.
They are not fully end-to-end. Recently, Carion et al. (2020) proposed DETR to eliminate the need
for such hand-crafted components, and built the first fully end-to-end object detector, achieving very
competitive performance. DETR utilizes a simple architecture, by combining convolutional neural
networks (CNNs) and Transformer (Vaswani et al., 2017) encoder-decoders. They exploit the ver-
satile and powerful relation modeling capability of Transformers to replace the hand-crafted rules,
under properly designed training signals.
Despite its interesting design and good performance, DETR has its own issues: (1) It requires
much longer training epochs to converge than the existing object detectors. For example, on the
COCO (Lin et al., 2014) benchmark, DETR needs 500 epochs to converge, which is around 10 to 20
times slower than Faster R-CNN (Ren et al., 2015). (2) DETR delivers relatively low performance
at detecting small objects. Modern object detectors usually exploit multi-scale features, where small
objects are detected from high-resolution feature maps. Meanwhile, high-resolution feature maps
lead to unacceptable complexities for DETR. The above-mentioned issues can be mainly attributed
to the deficit of Transformer components in processing image feature maps. At initialization, the
attention modules cast nearly uniform attention weights to all the pixels in the feature maps. Long
training epoches is necessary for the attention weights to be learned to focus on sparse meaning-
ful locations. On the other hand, the attention weights computation in Transformer encoder is of
quadratic computation w.r.t. pixel numbers. Thus, it is of very high computational and memory
complexities to process high-resolution feature maps.
In the image domain, deformable convolution (Dai et al., 2017) is of a powerful and efficient mech-
anism to attend to sparse spatial locations. It naturally avoids the above-mentioned issues. While it
lacks the element relation modeling mechanism, which is the key for the success of DETR.
∗
Equal contribution.
†
Corresponding author.
‡
Work is done during an internship at SenseTime Research.
1

剩余15页未读,继续阅读
资源评论


DrYJ
- 粉丝: 40
- 资源: 24









最新资源
- 论文(最终)_20240430235101.pdf
- 基于python编写的Keras深度学习框架开发,利用卷积神经网络CNN,快速识别图片并进行分类
- 最全空间计量实证方法(空间杜宾模型和检验以及结果解释文档).txt
- 5uonly.apk
- 蓝桥杯Python组的历年真题
- 2023-04-06-项目笔记 - 第一百十九阶段 - 4.4.2.117全局变量的作用域-117 -2024.04.30
- 2023-04-06-项目笔记 - 第一百十九阶段 - 4.4.2.117全局变量的作用域-117 -2024.04.30
- 前端开发技术实验报告:内含4四实验&实验报告
- Highlight Plus v20.0.1
- 林周瑜-论文.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


