
双目立体视觉的研究一直是机器视觉中的热点和难点。使用双目立体视觉系统可以确定任
意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。因此双目立体视觉系统可以
应用在多个领域。现说明介绍如何基于 HALCON 实现双目立体视觉系统,以及立体视觉的
基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率。Q
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体
三维几何信息的方法。双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两
幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视
差原理恢复出物体的三维几何信息,重建物体三维轮廓及位置。双目立体视觉系统在机器
视觉领域有着广泛的应用前景。Q
HALCON 是在世界范围内广泛使用的机器视觉软件。它拥有满足您各类机器视觉应用
需求的完善的开发库。HALCON 也包含 Blob 分析、形态学、模式识别、测量、三维摄像机
定标、双目立体视觉等杰出的高级算法。 HALCON 支持 Linux 和 Windows,并且可以通过
C、C++、C#、Visual Basic 和 Delphi 语言访问。另外 HALCON 与硬件无关,支持大多数图像
采集卡及带有 DirectShow 和 IEEE 1394 驱动的采集设备,用户可以利用其开放式结构快速开
发图像处理和机器视觉应用软件。Q
一.双目立体视觉相关基本理论说明Q
1.1 双目立体视觉原理Q
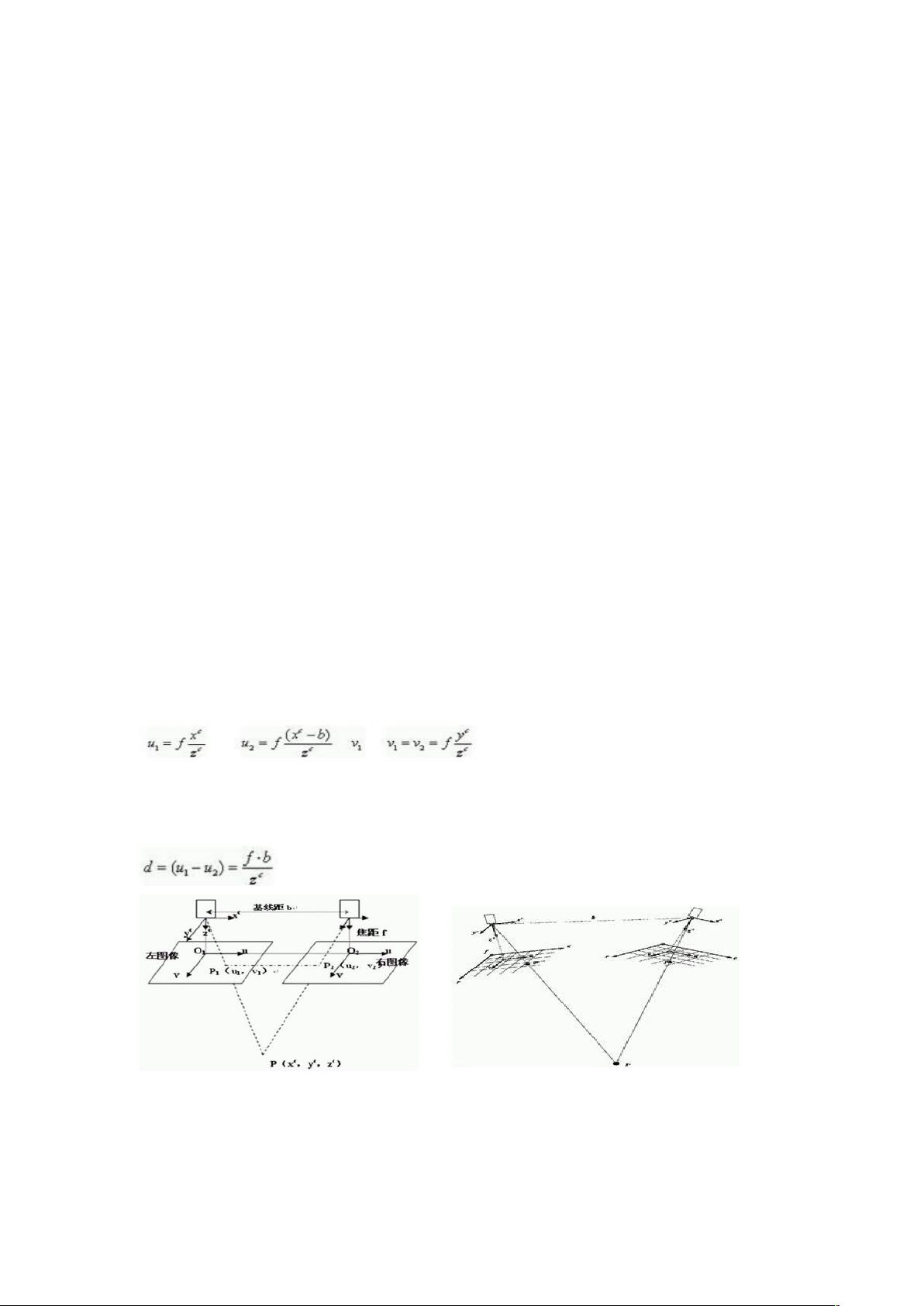
双目立体视觉三维测量是基于视差原理,图 1 所示为简单的平视双目立体成像原理图,
两摄像机的投影中心的连线的距离,即基线距为 b。摄像机坐标系的原点在摄像机镜头的
光心处,坐标系如图 1 所示。事实上摄像机的成像平面在镜头的光心后,图 1 中将左右成
像平面绘制在镜头的光心前 f 处,这个虚拟的图像平面坐标系 O1uv 的 u 轴和 v 轴与和摄像
机坐标系的 x 轴和 y 轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像
机光轴与平面的交点 O1 和 O2。空间中某点 P 在左图像和右图像中相应的坐标分别为
P1(u1,v1)和 P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点 P 图像坐标的 Y 坐标相
同,即 v1=v2。由三角几何关系得到:
上式中(xc,yc,zc)为点 P 在左摄像机坐标系中的坐标,b 为基线距,f 为两个摄像
机的焦距,(u1,v1)和(u2,v2)分别为点 P 在左图像和右图像中的坐标。Q
视差定义为某一点在两幅图像中相应点的位置差:
图 1 双目立体成像原理图 图 3 一般双目立体视觉系统原理图
由此可计算出空间中某点 P 在左摄像机坐标系中的坐标为:
资源评论













