LiteOS, A Unix-like Operating System and Programming.pdf


LiteOS, A Unix-like Operating System and Programming
Environment for Wireless Sensor Networks
Sensys Paper #89
Abstract
This paper presents LiteOS, a UNIX-like, multithreaded
operating system with object-oriented programming support
for wireless sensor networks. Aiming to build an easy-to-use
sensor network software platform, LiteOS offers a number
of features that are not available in existing sensor network
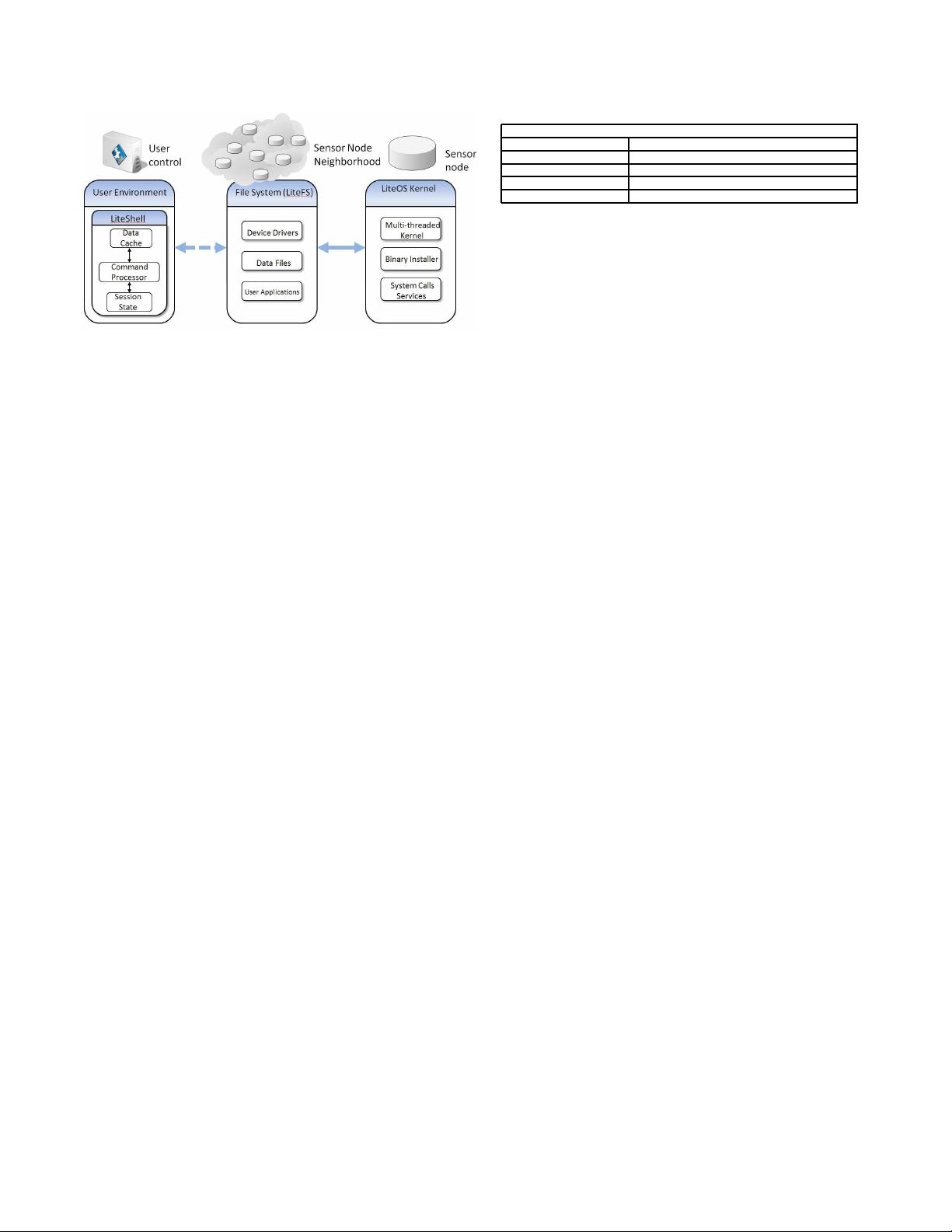
operating systems, including: (1) a built-in hierarchical file
system and a wireless shell for user interaction using UNIX-
like commands; (2) kernel support for dynamic loading and
native execution of multithreaded applications; and (3) an
object-oriented programming language that uses a subset of
C++ as its syntax with class library support. LiteOS com-
prises an evolvable kernel for application execution and a
compiler for application development, bridged by a suite of
expandable system calls. We evaluate it experimentally by
measuring the performance of common tasks using this op-
erating system, and demonstrate its programmability through
more than twenty application benchmarks.
1 Introduction
This paper introduces the first UNIX-like operating sys-
tem, called LiteOS, that fits on memory-constrained motes
such as MicaZ. This operating system is multithreaded and
comes bundled with a UNIX-like file system and a C++ com-
piler. The authors believe that such an operating system
could significantly expand the circle of sensor network appli-
cation developers by providing a familiar programming envi-
ronment based on UNIX, threads, and C++. While TinyOS
and its extensions have significantly improved programma-
bility of mote-class embedded devices via a robust, modular
environment, NesC and the event-based programming model
introduce a learning curve for most developers outside the
sensor networks circle. The purpose of LiteOS is to signifi-
cantly reduce such a learning curve. This philosophy is the
operating system equivalent of network directions taken by
companies such as Arch Rock [1] (that superimpose a famil-
iar IP space on mote platforms to reduce the learning curve
of network programming and management).
The rapid advances of sensor networks in the past few
years created many exciting systems and applications. Op-
erating systems such as TinyOS [16], SOS [15], Man-
tis [5], Contiki [9], and t-Kernel [14] provided software plat-
forms. Middleware systems such as TinyDB [21] and En-
viroTrack [4] made fast development of specialized applica-
tions feasible. Deployed applications ranged from global cli-
mate monitoring to animal tracking [18], promising unprece-
dented sampling of the physical world. Widespread adoption
and commercialization of sensor networks is the next logical
step.
The most obvious challenge in sensor network develop-
ment has been to fit within extremely constrained platform
resources. Previous work, such as TinyOS, therefore focused
on reducing overhead and increasing robustness. Since ini-
tial users were researchers, compatibility with common em-
bedded computing environments was not a major concern.
Moving forward, to decrease the barrier to widespread adop-
tion and commercialization, leveraging familiar abstractions
is advisable. One approach is to build user-friendly applica-
tions and GUIs such as SensorMap [25] and MoteView [7].
In this paper, we explore a complementary solution that tar-
gets the operating system and programming environment.
We build a familiar software platform by leveraging the
likely existing knowledge that common users (outside the
current sensor network community) already have: Unix,
threads, and C++. We introduce an interactive operating
system, called LiteOS, and a programming language, called
LiteC++. LiteOS supports a Unix-like environment for mul-
tithreaded user applications, and LiteC++ supports a subset
of C++ (with one keyword from Java) for application devel-
opment. They are referred to in general as the LiteOS plat-
form, when no ambiguity arises. Since our primary goal is
to increase adoption, we also optimize LiteOS for efficiency
and robustness.
LiteOS differs from both current sensor network operat-
ing systems and more conventional embedded operating sys-
tems. Compared to the former category, such as TinyOS,
LiteOS provides a more familiar environment to the user. Its
features are either not available in existing sensor network
operating systems, such as the shell and C++ compiler, or
are only partially supported, such as dynamic loading sup-
port. Compared to the latter category (conventional embed-
ded operating systems), such as VxWorks [31], eCos [2], em-
bedded Linux, and Windows CE, LiteOS has a much smaller
code footprint, running on platforms such as MicaZ, with a
8MHz CPU, 128K bytes of program flash, and 4K bytes of
RAM. Embedded operating systems, such as VxWorks, re-
quire more computation power (e.g., ARM-based or XScale-
based processors) and more RAM (at least tens of KBytes),
and thus cannot be easily ported to MicaZ-class hardware
platforms (such as MicaZ, Tmote, and Telos).
A possible counter-argument to our investment in a small-
footprint UNIX-like operating system is that, in the near
future, Moore’s law will make it possible for conventional
Linux and embedded operating systems to run on motes.
For example, the recent iMote2 [6] platform by CrossBow
features an XScale processor that supports embedded Linux.
Sun and Intel also demonstrated more powerful sensor net-
work hardware platforms [3, 24]. While it is true that more
resources will be available within the current mote form fac-
tor, Moore’s law can also be harvested by decreasing the
form factor while keeping resources constant. For exam-
ple, the current MicaZ form factor is far from adequate for
wearable computing applications. Wearable body networks
can have a significant future impact on healthcare, leisure,
and social applications if sensor nodes could be made small

剩余13页未读,继续阅读
资源评论

 scarlettguojia2015-04-01学习轻量级O/S 很好的资料
scarlettguojia2015-04-01学习轻量级O/S 很好的资料- mjq00112015-10-29好东西,顶!!只是一直找不到源码!
- lx00312016-05-04好东西,资源提交很快!
- ashine92015-07-13看过了,很有参考价值。
 ahui12015-06-16是个号东东,学习学习
ahui12015-06-16是个号东东,学习学习












