### 51系列单片机UART通信详解
#### 串口通讯基础
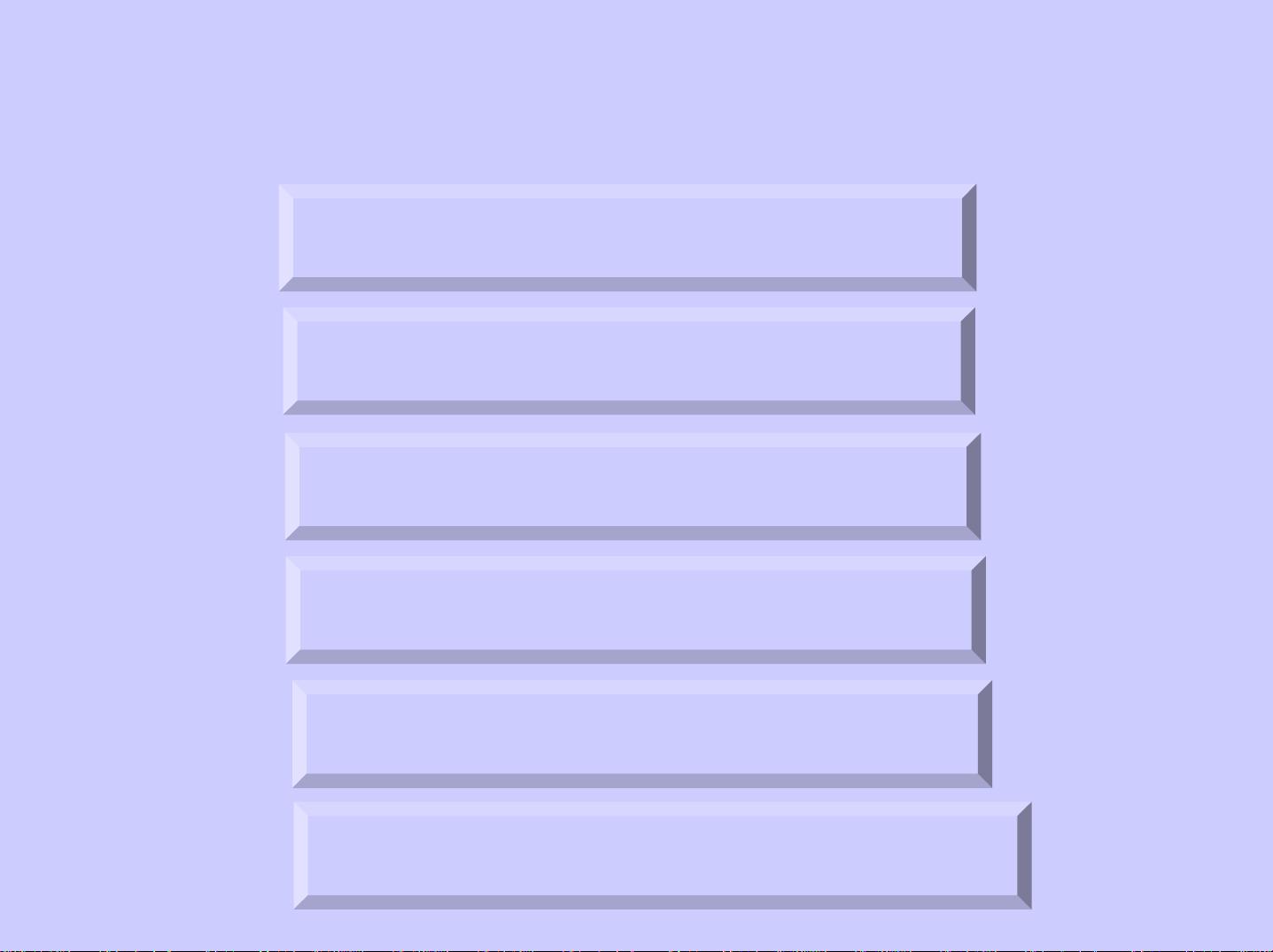
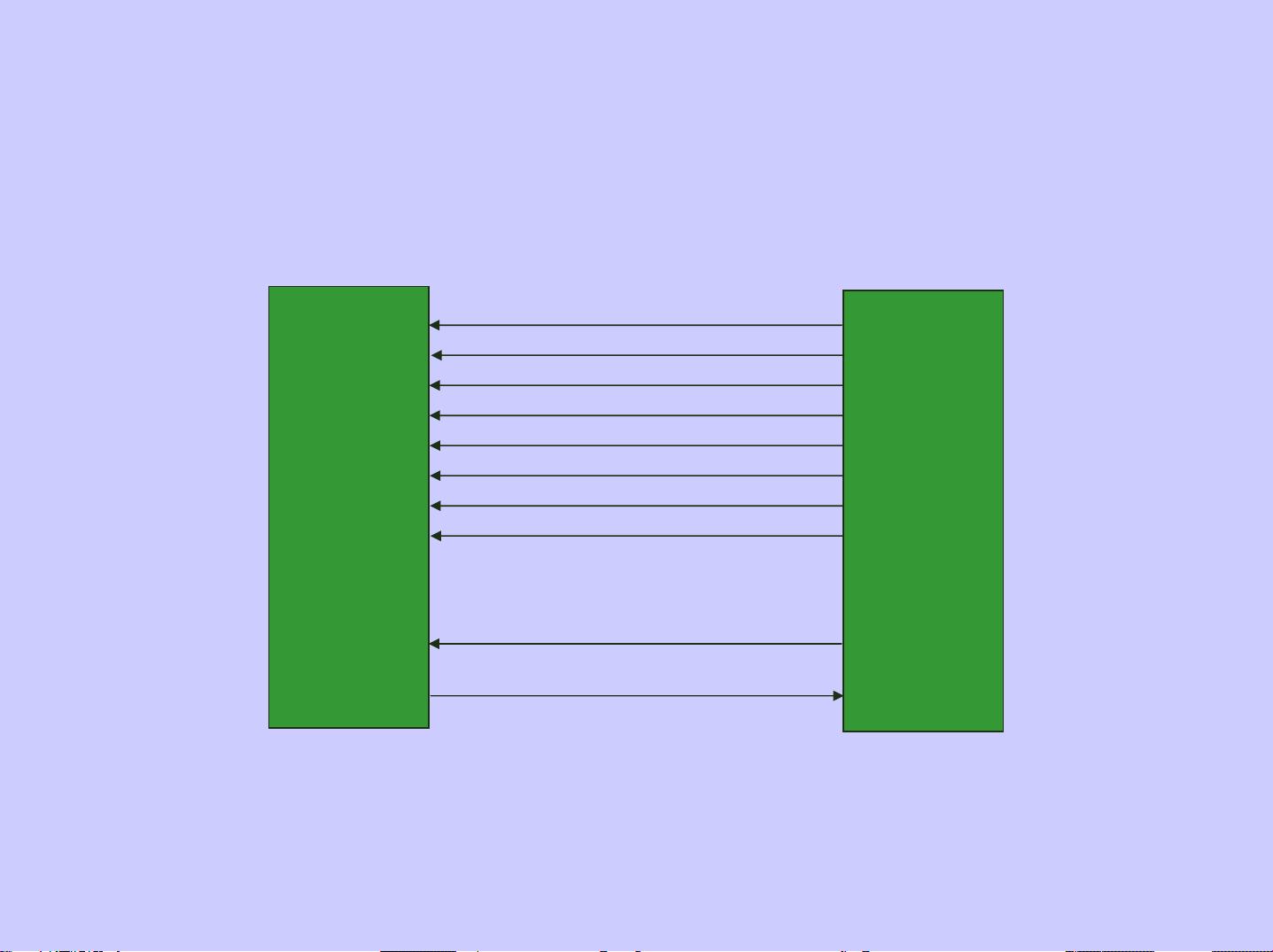
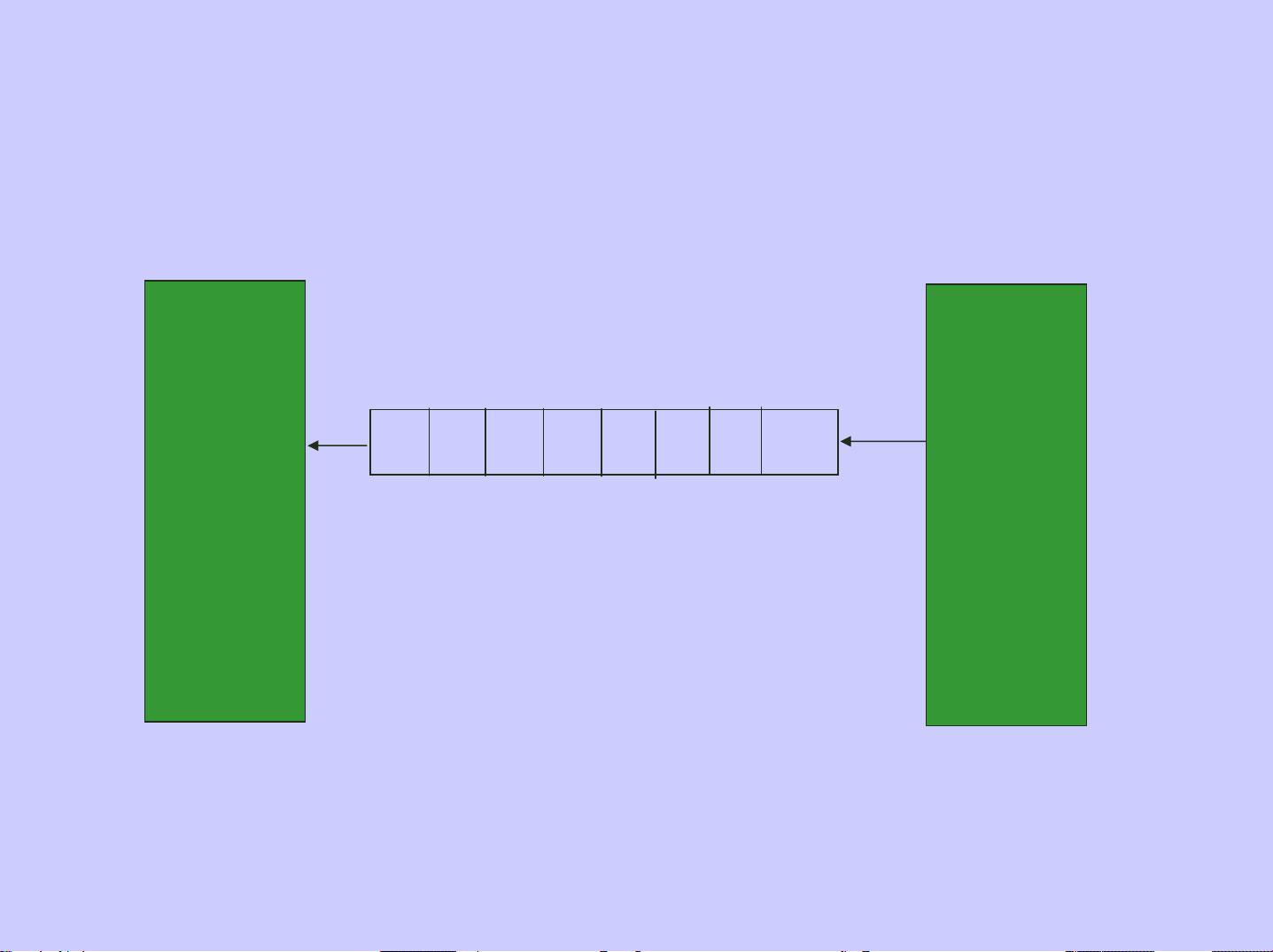
串行通讯是数据传输的一种形式,其中数据字节被分解成一个个位,通过一条数据线依次传输。这种方式与并行通讯形成对比,后者是将数据字节的每一位同时通过单独的数据线进行传输。尽管并行通讯在短距离内提供了高速度和简单的控制,但由于其需要大量的传输线,因此在长距离传输中成本高昂。相比之下,串行通讯虽然控制更为复杂,但由于传输线数量较少,特别适合于长距离通信,同时可以利用现有的电话网络等基础设施,降低了成本。
#### 异步与同步通讯
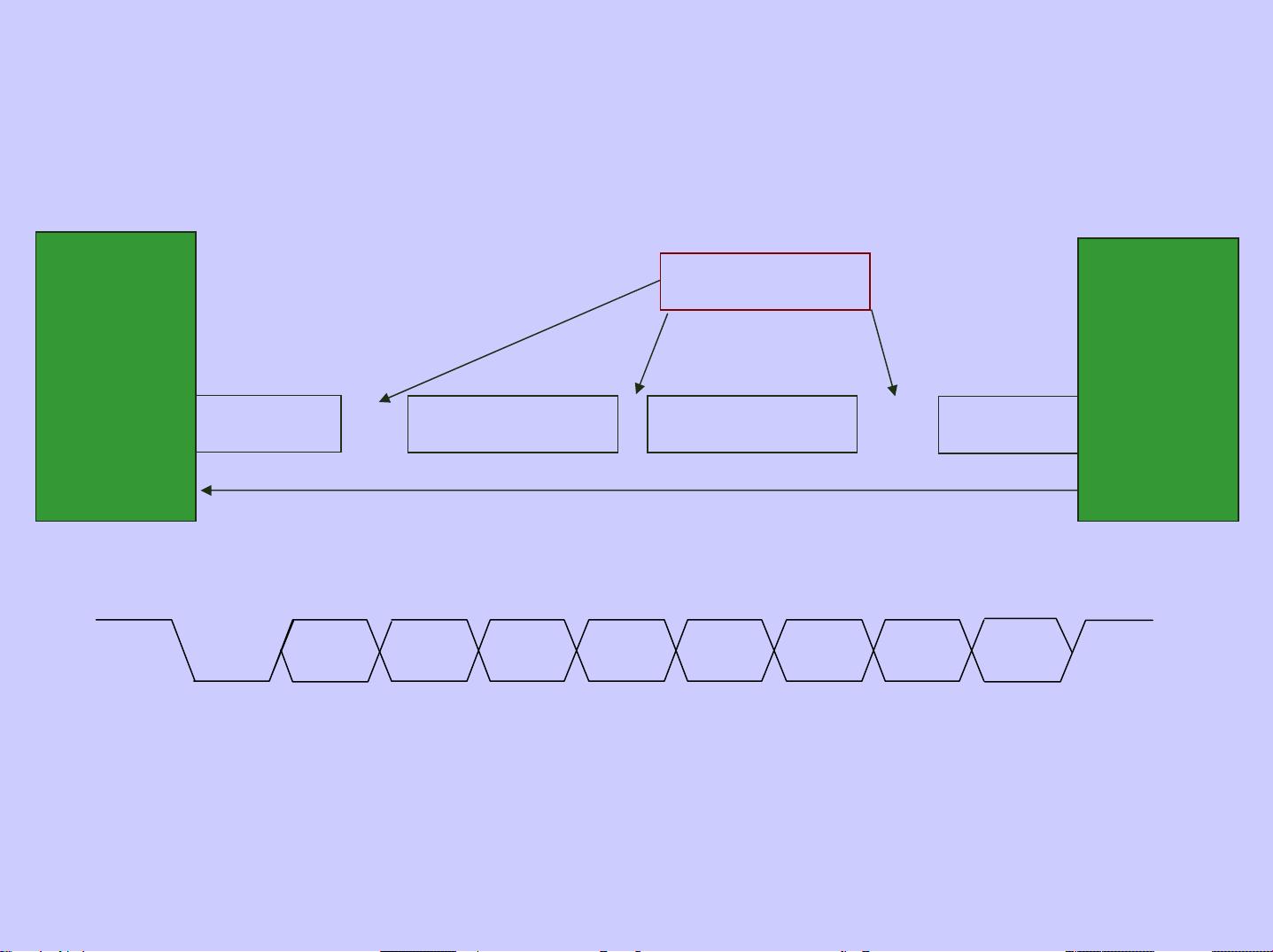
异步通讯采用字符作为基本传输单位,每个字符由起始位和停止位界定,字符间的间隔不定。这种模式下,只有在实际传输字符时才需要同步,因此相对简单灵活。异步通讯中,数据的格式和波特率(传输速率)是两个关键参数,需要在通讯双方之间达成一致。
同步通讯则以一系列字符作为一个传输单元,通常使用同步字符来标识一串字符的开始,并且要求双方严格同步,硬件要求较高。同步通讯中的数据和时钟信号可能分开传输(外同步),也可能包含在同一信号中(自同步)。
#### MCS-51串行控制
MCS-51系列单片机内置了全双工串行接口,能够同时实现数据的发送和接收。串行接口的输入/输出引脚为TXD (P3.1) 和 RXD (P3.0)。根据不同的工作方式,数据格式可以是一帧8位、10位或11位。无论是发送还是接收,数据都是从最低位开始传输。
当一帧字符发送或接收完成时,会设置相应的标志位TI或RI,并触发串行接口中断请求。串行接口的中断控制由中断允许位ES控制,中断服务程序的入口地址为0023H。
#### 串行接口控制寄存器SCON
SCON寄存器(地址为98H)用于控制和监控串行口的操作。它包含了工作方式选择位SM0和SM1,用于确定串行口的四种工作模式;SM2是多机通讯控制位,REN是接收使能位,TB8和RB8分别是发送和接收的第9位数据,TI和RI则是发送和接收中断标志位。
此外,波特率的控制还受到PCON寄存器中的SMOD位的影响。当SMOD设置为1时,波特率将翻倍,这为调整通讯速度提供了一定的灵活性。
#### 工作方式
MCS-51串行口有四种工作方式:
1. **方式0**:同步移位寄存器方式,适用于扩展并行I/O接口。在该方式下,每帧数据为8位,没有起始位和停止位,波特率为晶振频率除以12。例如,当晶振频率为12MHz时,波特率为1MHz,即每位数据的传输时间为1微秒。
2. **方式1和方式2**:这两种方式支持异步通讯,提供标准的起始位和停止位,以及可编程的波特率。方式1提供可变波特率,而方式2的波特率固定,但支持自动地址识别和多机通讯。
3. **方式3**:类似于方式2,但在波特率配置上提供了更多灵活性,适合需要更高速度或特殊波特率配置的应用场景。
#### 发送与接收时序
在发送过程中,当数据被写入SBUF寄存器时,发送操作启动。一旦一帧数据发送完毕,TI标志位被置为1,表明发送操作完成。接收时,REN位必须设置为1且RI位为0,接收过程才会启动。当一帧数据接收完成后,RI标志位会被置为1。
MCS-51系列单片机的UART通信功能强大,不仅支持多种工作方式,还能根据应用需求灵活调整波特率,是嵌入式系统设计中不可或缺的通信手段之一。通过深入理解其工作原理和控制机制,开发人员能够充分利用这一资源,实现高效、可靠的串行数据交换。