



2019 年全国大学生电子设计竞赛
模拟电磁曲射炮(H 题)
【本科组】
2019 年 8 月 10 日

1
摘要
本系统为模拟电磁炮发射系统,在加入视觉追踪算法的同时,既要保证电磁炮射
击精度,又要把控射击时间。我们采用以
STM32F407ZGT6
单片机为主,以视觉追踪
算法为辅的电磁炮控制系统,实现了对高速度高精度的电磁炮发射系统控制。本设计
的主要模块为单片机控制器、摄像头、舵机云台、自治电磁炮以及控制键盘。其中控
制器为
S
TM32F
407ZGT6
最小系统开发版,摄像头采用
O
penMv
4
,并通过
Android
手机
键盘控制。通过摄像头捕获并追踪目标,控制舵机旋转与电磁炮发射,达到模拟电磁
炮控制的目的。
关键词:单片机控制器;电磁炮;目标追踪;图像识别;远程控制
目录
摘要
..............................................................................................................................................1
1.
系统方案
...........................................................................................................................2
1.1
单片机控制模块的论证与选择
...........................................................................2
1.2
电磁炮发射模块的论证与选择
...........................................................................2
1.3
云台模块的论证与选择
........................................................................................3
1.4
摄像头模块的论证与选择
....................................................................................3
2.
理论分析与计算
.............................................................................................................3
2.1
控制算法分析
..........................................................................................................3
2.2
电磁炮导弹分析
......................................................................................................4
2.3
电磁炮能量分析及参数计算
...............................................................................5
3.
电路与程序设计
.............................................................................................................6
3.1
电磁炮发射模块电路设计
....................................................................................6
3.2
超声波测距模块时序逻辑图
...............................................................................6
3.3
图像识别及追踪程序流程
....................................................................................7
3.4
舵机控制程序流程
.................................................................................................7
4.
测试结果
...........................................................................................................................7
4.1
测试仪器和方法
......................................................................................................7
4.2
测试数据
....................................................................................................................7
2
4.3
测试结果及分析
......................................................................................................8
1.
系统方案
本系统主要由单片机控制模块、电磁炮发射模块、云台模块、摄像头模块、角度
传感器模块、超声波测距模块、电源模块组成,下面论证上述模块的选择。
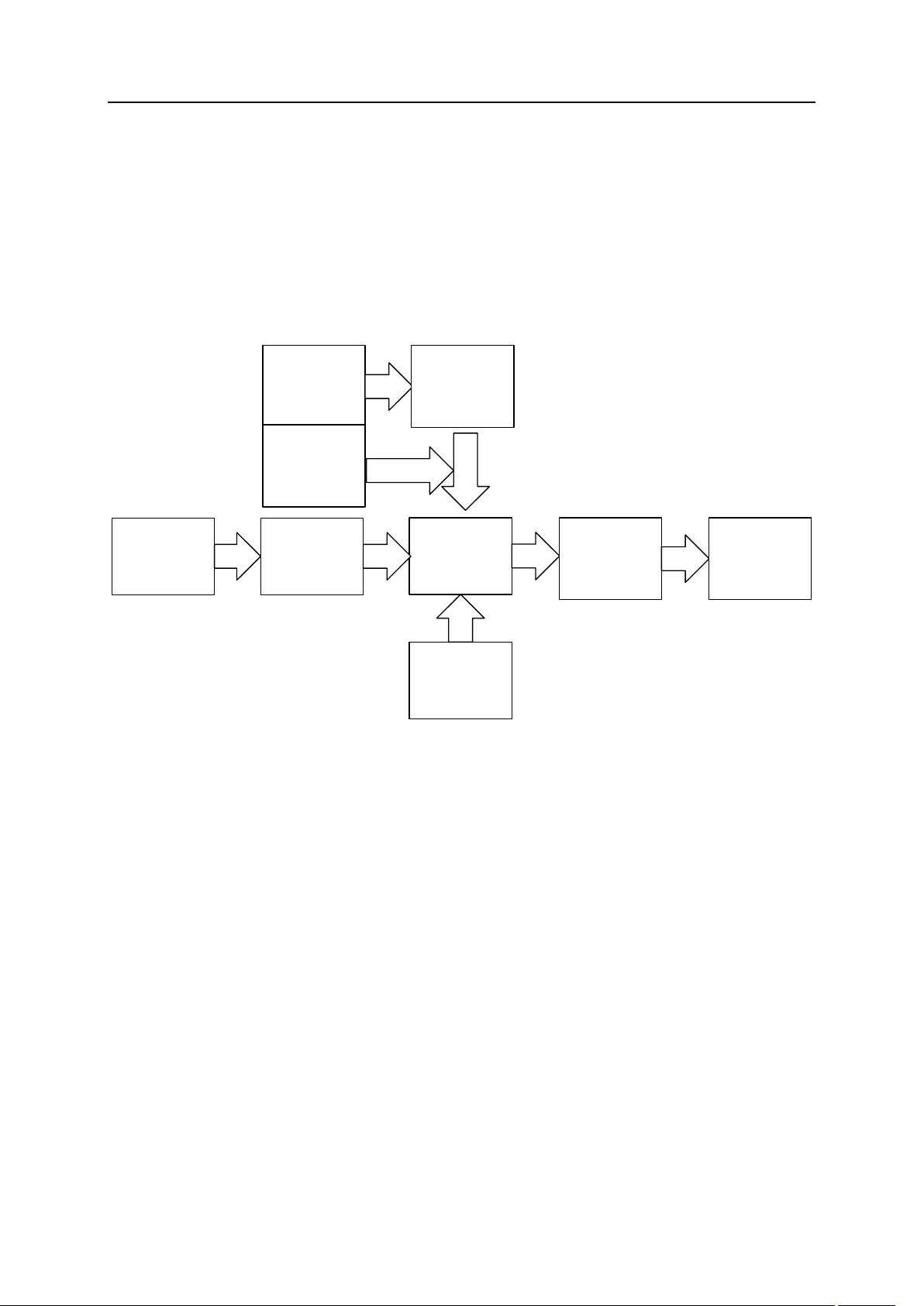
图 1 系统总框架图
1.1
单片机控制模块的论证与选择
方案一:选用
S
TM32F103RC
单片机最小系统板,具有功能强大、效率较高的指令
系统,但芯片主频只能达到
72MHZ
,还不能满足本题的中对动态目标靶的实时追踪及
开关控制的高实时性
在此处键入公式。
要求。
方案二:选用
S
TM32F4
07
ZGT6
单片机最小系统板,与方案一所选芯片基本相同,
但主频可达
168MHZ
,可满足题目的高实时性要求与图像识别算法的运算。
在模拟电磁炮发射系统中,采用方案二作为本系统的主控芯片更为合适。
1.2
电磁炮发射模块的论证与选择
方案一:采用自制线圈炮筒和高压直流稳压电源,将小球放置在炮筒底部,利用
接通时的线圈磁场变换,将小钢珠射出。但无法控制小钢珠发射初速度与发射时机,
且直流电源要求过高,危险且不易实现。
STM32F4ZGT6
最小系统板
题目2&题目3
键盘输入距离
与角度
距离
角度
题目4~题目6
OpenMV检测
并返回靶向距
离
舵机旋转角度 钢柱落地位置
电磁炮充能及
发射模块
以固定初速度
射出,角度可
变
超声波测距
模块













