摘要:
关 键 词:重力模型;垂线偏差;三阶马尔科夫;导航误差分析
中图分类号:U666.1 文献标志码:A
Abstract:
2 重力模型误差的分析与仿真
2.1 重力模型误差
文献[7]中介绍的大地水准面的重力误差原理图如图 1 所示,根据此原理图,给出的重力模型误差表达式
为:
(5)
图 1. 重力模型误差原理图
Fig.1 Principle of Gravity Model Error
式中, 为大地水准面测量点上的实际重力, 为根据参考椭球计算的重力。习惯上,重力扰动向
量 的大小被称之为重力扰动,本文沿用此命名方式。重力扰动方向为垂线偏差,用东向和北向偏差角
和 表征。本文只考虑重力模型误差中的东向和北向垂线偏差,所以重力模型误差可以简化为:
= [ 0 ]
T
(6)
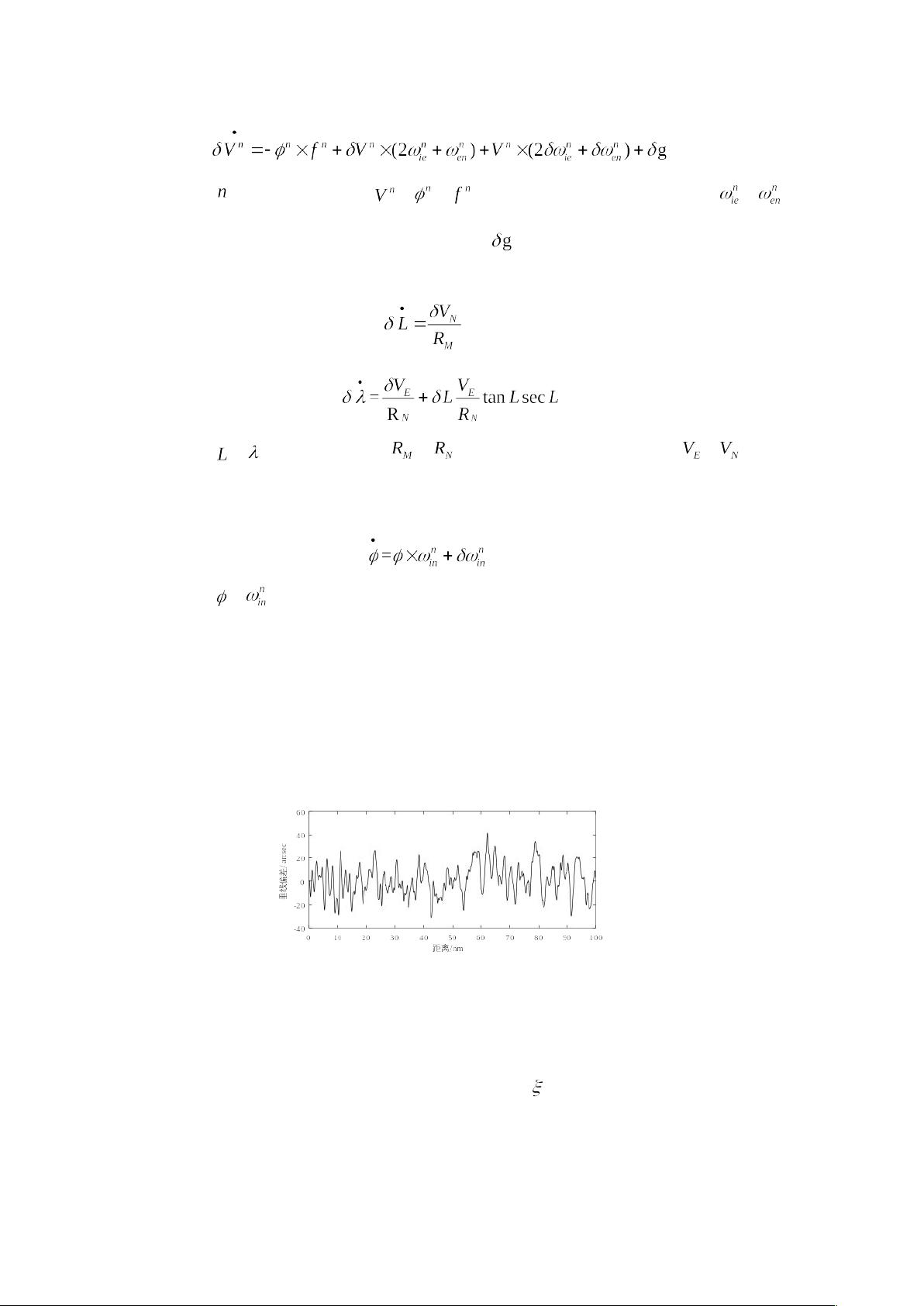
2.2 重力模型误差的仿真
文献[13]详细阐述了空间稳定惯性导航系统的各惯性仪表误差和导航算法引起的导航误差,本文在此基
础上,仅考虑重力误差模型对系统的影响,不考虑其他误差来源,即初始对准误差为 0,惯性器件的常值
漂移、标度因数误差和安装误差为 0。另外,由于高度通道不稳定,所以本文不考虑高度通道的速度和位
置误差。在高精度的导航过程中,重力模型误差带来的影响可以等效为加速度计偏置误差, 因此在采用东
北天(ENU)导航坐标系的基础上,重力模型误差与导航误差有如下关系式。
速度误差方程为