互联和自动化车辆的联合学习:现有方法和挑战的调查-Federated Learning for Connected and Au
需积分: 5 114 浏览量
2024-04-29
11:01:28
上传
评论
收藏 3.01MB PDF 举报


IEEE TRANSACTIONS ON INTELLIGENT VEHICLES, VOL. 9, NO. 1, JANUARY 2024 119
Federated Learning for Connected and Automated
Vehicles: A Survey of Existing Approaches
and Challenges
Vishnu Pandi Chellapandi , Member, IEEE, Liangqi Yuan , Graduate Student Member, IEEE,
Christopher G. Brinton
, Senior Member, IEEE,StanislawH.
˙
Zak , Life Member, IEEE,
and Ziran Wang
, Member, IEEE
Abstract—Machine learning (ML) is widely used for key tasks in
Connected and Automated Vehicles (CAV), including perception,
planning, and control. However, its reliance on vehicular data for
model training presents significant challenges related to in-vehicle
user privacy and communication overhead generated by massive
data volumes. Federated learning (FL) is a decentralized ML ap-
proach that enables multiple vehicles to collaboratively develop
models, broadening learning from various driving environments,
enhancing overall performance, and simultaneously securing local
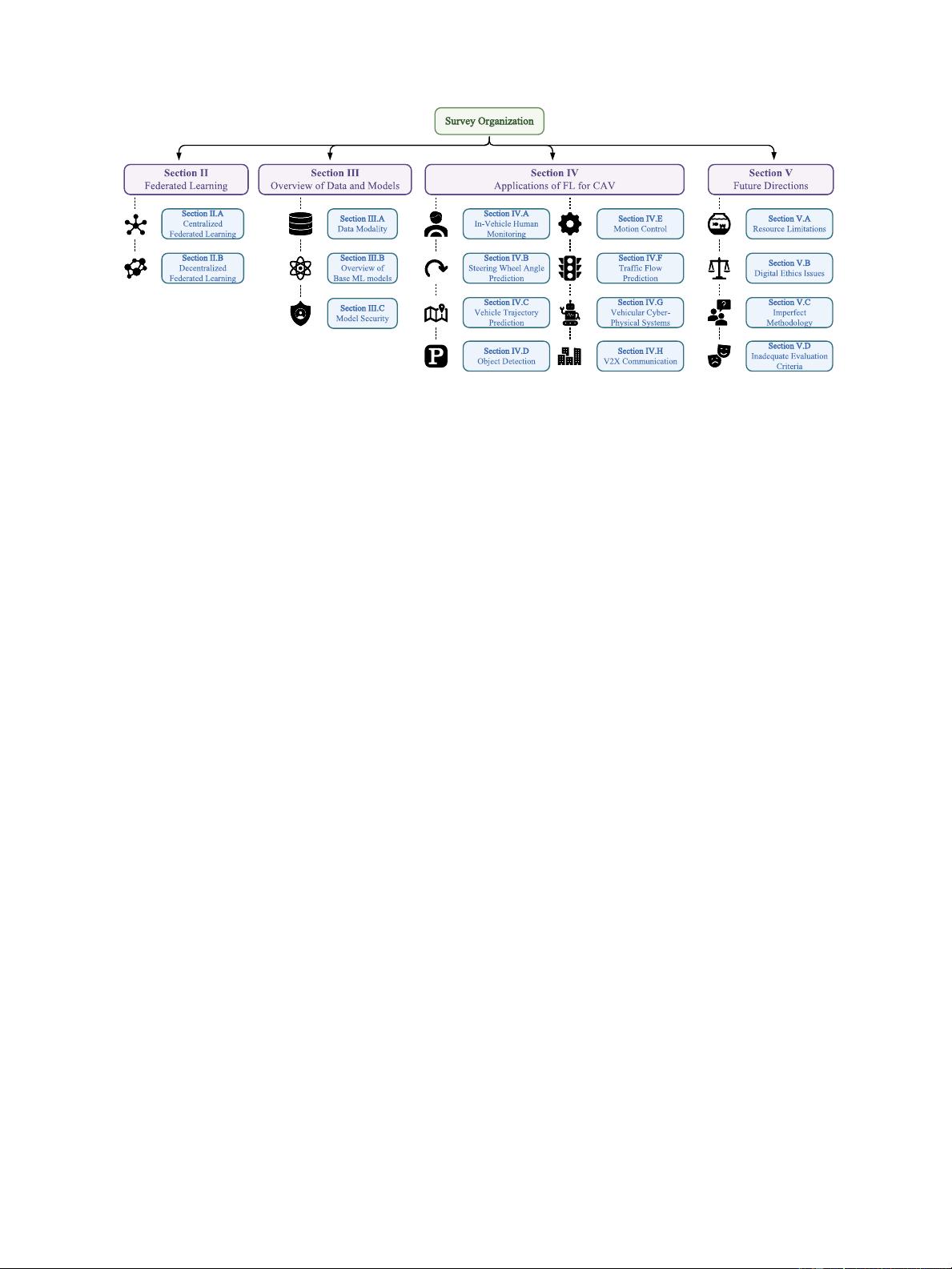
vehicle data privacy and security. This survey paper presents a
review of the advancements made in the application of FL for CAV
(FL4CAV). First, centralized and decentralized frameworks of FL
are analyzed, highlighting their key characteristics and method-
ologies. Second, diverse data sources, models, and data security
techniques relevant to FL in CAVs are reviewed, emphasizing their
significance in ensuring privacy and confidentiality. Third, specific
applications of FL are explored, providing insight into the base
models and datasets employed for each application. Finally, existing
challenges for FL4CAV are listed and potential directions for future
investigation to further enhance the effectiveness and efficiency of
FL in the context of CAV are discussed.
Index Terms—Federated learning, connected and automated
vehicles, distributed computing, privacy protection, data security.
I. INTRODUCTION
C
ONNECTED and automated vehicles (CAV) are the key
to future intelligent transportation systems (ITS) that en-
compass both ground and air transportation [1] , [2], [3], [4], [5],
[6], [7], [8], [9]. With the advent of Big Data, the Internet of
Things (IoT), edge computing, and intelligent systems, CAVs
have the potential to improve the overall transportation system
by reducing traffic accidents, congestion, and pollution [10],
[11], [12], [13]. CAVs integrate both Vehicle-to-Vehicle (V2V)
and Vehicle-to-Infrastructure (V2I) communication capabilities,
facilitating an enhanced perception of the environment beyond
Manuscript received 3 October 2023; revised 31 October 2023; accepted 10
November 2023. Date of publication 14 November 2023; date of current version
23 February 2024. (Corresponding author: Ziran Wang.)
The authors are with the College of Engineering, Purdue University, West
Lafayette, IN 47907 USA (e-mail: cvp@purdue.edu; liangqiy@purdue.edu;
cgb@purdue.edu; zak@purdue.edu; ryanwang11@hotmail.com).
Color versions of one or more figures in this article are available at
https://doi.org/10.1109/TIV.2023.3332675.
Digital Object Identifier 10.1109/TIV.2023.3332675
the direct line of sight [14], [15], [16]. This involves interac-
tion with other vehicles, traffic s ignals, pedestrians, and other
elements of the transportation ecosystem. Furthermore, CAVs
are designed to assume control of driving tasks by the human
operator under certain conditions, using a variety of sensors
and sophisticated machine learning (ML) algorithms to achieve
autonomous operation.
Currently, CAVs are generating a tremendous amount of raw
data, between 20 and 40 TB per day, per vehicle . The various
sources of these data include engine components, electronic con-
trol units (ECU), perception sensors, and vehicle-to-everything
(V2X) communications. This large amount of data is sent to
other vehicles, roadside infrastructures, or the cloud, continu-
ously or periodically for monitoring, prognostics, diagnostics,
and connectivity features [17]. This flow of data has driven
the flourishing deployment and application of ML in CAVs,
including areas such as Advanced Driver-Assistance Systems
(ADAS) [18], automated driving [19],ITS[20], and sustainable
development [21].
A. Motivation
Due to the large amount of data required to train ML models,
concerns have been raised about data security in terms of the
legitimacy of data collection, data misuse, and privacy breaches.
Data collected by various sensors in CAVs, are also considered
private and are subject to stringent privacy protection regulations
in different regions. One such example is the General Data
Protection Regulation (GDPR) in the European Union [22],
which imposes strict requirements and guidelines on the han-
dling and processing of personal data to ensure i ndividuals’
privacy rights are protected. Even with the development of
advanced ML techniques and vehicle connectivity, it has not
been feasible to have a secure framework to collect data from
every vehicle and train an ML model. These limitations led to
the development of a new ML paradigm known as Federated
Learning (FL) [23], [24]. The term Federated Learning (FL) has
been coined by Google [25]. FL was initially used for mobile
keyboard prediction in Gboard [26] to allow multiple mobile
phones to cooperatively and securely train an ML model. FL has
been extensively applied in various fields such as industry [27],
[28], [29], energy [30], [31], healthcare [32], [33], and more.
2379-8858 © 2023 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See https://www.ieee.org/publications/rights/index.html for more information.
Authorized licensed use limited to: Zhengzhou University. Downloaded on April 27,2024 at 09:15:34 UTC from IEEE Xplore. Restrictions apply.

剩余18页未读,继续阅读
资源评论


yuan_0012
- 粉丝: 1
- 资源: 6











