权 利 要 求 书
1、一种基于两级自动扶正系统的高效大蒜播种装置,其特征在于,集挡板同步带与
凸轮原理轨道扶正装置(一级扶正装置)、圆弧锥体扶正装置(二级扶正装置)于一体,
辅有打穴、覆土等装置,并配合采用先打穴后播种的方式,其中:
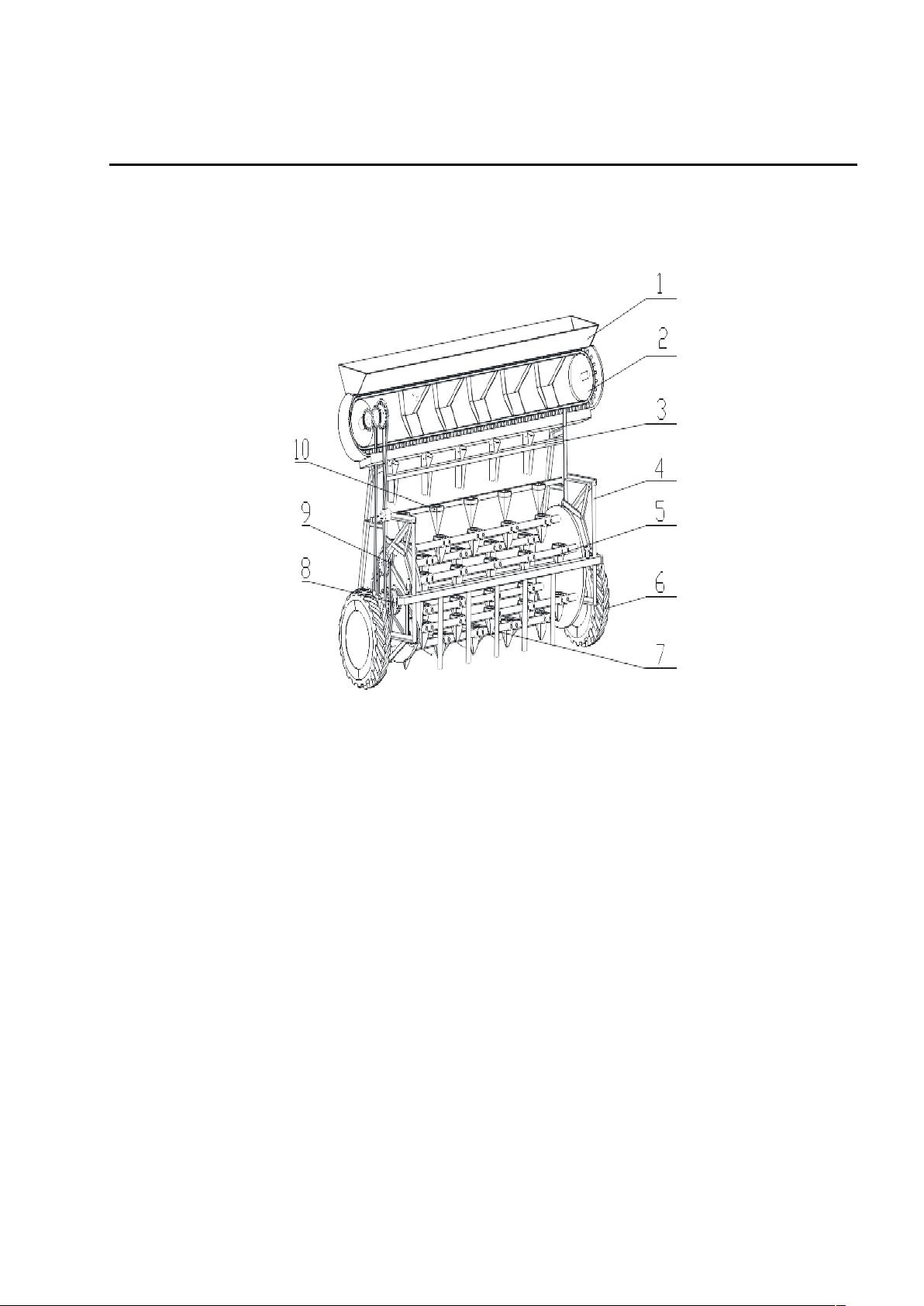
所述基于挡板同步带与凸轮原理轨道的扶正装置(一级扶正装置)包括依次设置在上
部的料斗与喂料装置、下部的通过凸轮原理轨道实现根芽反转的扶正系统以及能够连通并
使蒜种落入二级扶正装置的柔性导料长管;在所述的料斗与喂料装置中设有挡板、喂料口,
在所述通过凸轮原理轨道实现根芽反转的扶正系统中设置有凸轮、挡板、导蒜槽及与所述
柔性导料长管相连的落料口,利用蒜种鳞芽根部与尖部的特征不同(根部有一粗糙平面,
而尖部则为尖状)设计的一种平面凸轮原理轨道,蒜种经挡料板滑落至一级凸轮槽预扶正
系统,落入同步带挡板间的导蒜槽中,在挡板的推动下通过平面凸轮原理轨道;当大蒜种
子根部向下时,由于根部为一粗糙平面,所以蒜种无法在凸轮原理轨道的起始处进入,进
而继续保持竖直并移动到落料口处落下,进而落入二级扶正系统;当蒜种鳞芽尖部向下时,
鳞芽的尖部会插入凸轮原理轨道,在凸轮原理轨道上移动逐渐翻转,轨道的末端有一顶起
装置,将大蒜种子顶起实现根芽翻转,翻转后的大蒜种子鳞芽尖部向上移动到落料口处落
下;经过该一级凸轮槽预扶正系统,大部分大蒜种子的根芽得以被识别并初步实现大蒜种
子根芽方向一致,并确保蒜种能够以每次一粒的数量同步掉落至二级扶正机构,保证蒜种
不脱落;
所述圆弧锥体柔性碰撞扶正装置(二级扶正装置)包括固定式圆弧锥体及旋转式圆弧
锥体两部分;所述上部固定圆弧锥体系统的每个圆弧锥体下方不完全闭合,有一直径约
5mm 的圆孔,锥体由两个可张合的半锥体组成,其中一个半锥体下方伸出一个竖直挡片;
所述旋转式圆弧锥体与所述固定式圆弧锥体在圆盘连杆的作用下相互配合,当旋转式圆弧锥
体旋转到固定式圆弧锥体的下方时,将其两个半锥体顶开,蒜种在重力的作用下落入旋转式
圆弧锥体中;当蒜种根部朝下时,旋转式圆弧锥体直接顶开固定式圆弧锥体的挡片,蒜种竖
直落下,当蒜种鳞芽尖部朝下时,使得蒜种在旋转式圆弧锥体上方边缘处旋转,在重力作用
下实现反转,根部朝下落入旋转式圆弧锥体中;
所述电磁补种装置由柔性导管内的光电计数传感器、储蒜管和推力电磁铁组成,是为了
防止极小概率下一级扶正装置不能正常出种的情况。播种前事先把蒜种扶正投入储蒜管中,
当播种时光电计数传感器检测到没有蒜种通过,推力电磁铁就会被触发将一颗蒜种推入二级
扶正装置中继续进行下一播种步骤。
所述打穴装置由联排的细长型圆柱体插杆组成,底端为锥体形状,便于打穴,位于第
二级圆弧锥体柔性碰撞重力扶正系统前端,便于完成先打穴后播种的工作;机构工作时,
电机带动第二级圆弧锥体扶正系统转动的同时,打穴装置经由链轮的传动获取动力,带动
六连杆机构同步地作上下的往复运动,运动频率与旋转式圆盘的直径及圆弧锥体的行数有
关,从而使插杆完成打穴的工作;










评论0
最新资源