RobotStudio码垛机器⼈创建过程 ⼀、安装夹具 1. 导⼊⼀个IRB2600机器⼈ 2. 移动夹具的本地坐标原点,使原点位置为顶⾯中⼼(与法兰盘连接的部位) 3. 对齐夹⽖Smart组件的本地坐标和机器⼈末端法兰盘的坐标,使夹具的本地坐标与法兰盘的本地坐标重合,为下⼀步安装夹具做准 备。 4. 在布局菜单内,将夹具拖动到IRB2600机器⼈上,完成夹具的安装 ⼆、创建传送带 1. 导⼊传送带并设定传送带的位置 2. 创建码垛⽤的物体,并将其移动到传送带的起点。 3. 创建⼀个Smart组件,⽤于传送带物体的运动。添加如下组件 4. 对各个组件进⾏设置 三、创建码垛底盘 四、创建机器⼈系统 选项内选择如下选项 ? 1. 在仿真设定中,将机器⼈系统后⾯的框选去除。 2. 运⾏仿真,使物块到达⾯传感器处,然后停⽌仿真,捕捉⼏个⽬标点。(后⾯两个⽬标点是为了码垛时,物块会有两种拜访姿态,所 以使⽤两个⽬标点) 3. 旋转第三个⽬标点,使其绕Z轴旋转-90度。 4. 为⽬标点配置参数 5. 使机器⼈回到机械原点,然后创建⼀个空路径,将三个⽬标点依次拖动到路径中。 6. 同步到⼯作站 7. 删除之前仿真出来的物块的copy物体。 8. 添加两个信号,⼀个是到位信号,⽤于传送带的等待,另⼀个是夹具信号。添加完成后重启控制器。 9. 打开控制器,可以看到RAPID/T_ROB1下的程序模块,接下来就可以进⾏程序编写了。 程序编写 main程序代码如下 MODULE Module1 CONST robtarget Target_10:=[[347.037,682.5,875.06],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST robtarget Target_10:=[[347.037,682.5,875.06],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST robtarget Target_20:=[[500,-300,100],[1,0,0,0],[-1,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]]; CONST robtarget Target_30:=[[500,-300,100],[0,0,0,1],[-1,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]]; VAR num layer:=1; VAR num x:=0; VAR num z:=0; PROC main() FOR i FROM 0 TO 20 DO SetDO JiaJu0,0; MoveJ Offs(Target_10,0,0,200),v500,fine,Tool1; WaitDI DaoWei0,1; MoveL Offs(Target_10,0,0,0),v500,fine,Tool1; SetDO JiaJu0,1; WaitTime 1; MoveL Offs(Target_10,0,0,200),v500,fine,Tool1; IF layer MOD 2 = 1 THEN IF i MOD 5 < 4 and i MOD 5 <> 0 THEN MoveL Offs(Target_30,90+x,-150,300+z),v500,fine,Tool1; MoveL Offs(Target_30,90+x,-150,100+z),v500,fine,Tool1; SetDO JiaJu0,0; WaitTime 1; MoveL Offs(Target_30,90+x,-150,300+z),v500,fine,Tool1; x:=x+210; IF i MOD 5 = 3 THEN x:=0; ENDIF ELSE MoveL Offs(Target_20,150+x,-410,300+z),v500,fine,Tool1; MoveL Offs(Target_20,150+x,-410,100+z),v500,fine,Tool1; SetDO JiaJu0,0; WaitTime 1; MoveL Offs(Target_20,150+x,-410,300+z),v500,fine,Tool1; x:=x+300; ENDIF IF i MOD 5 = 0 THEN layer:=2; x:=0; z:=z+100; ENDIF ELSE IF i MOD 5 < 3 THEN MoveL Offs(Target_20,150+x,-100,300+z),v500,fine,Tool1; MoveL Offs(Target_20,150+x,-100,100+z),v500
【码垛机器人创建过程】
在工业自动化领域,码垛机器人被广泛用于生产线末端的包装和堆叠任务。ABB的RobotStudio是一款强大的仿真软件,能够帮助用户设计和优化码垛机器人系统。以下是从提供的文件中提炼出的关于创建码垛机器人过程的关键知识点:
一、安装夹具
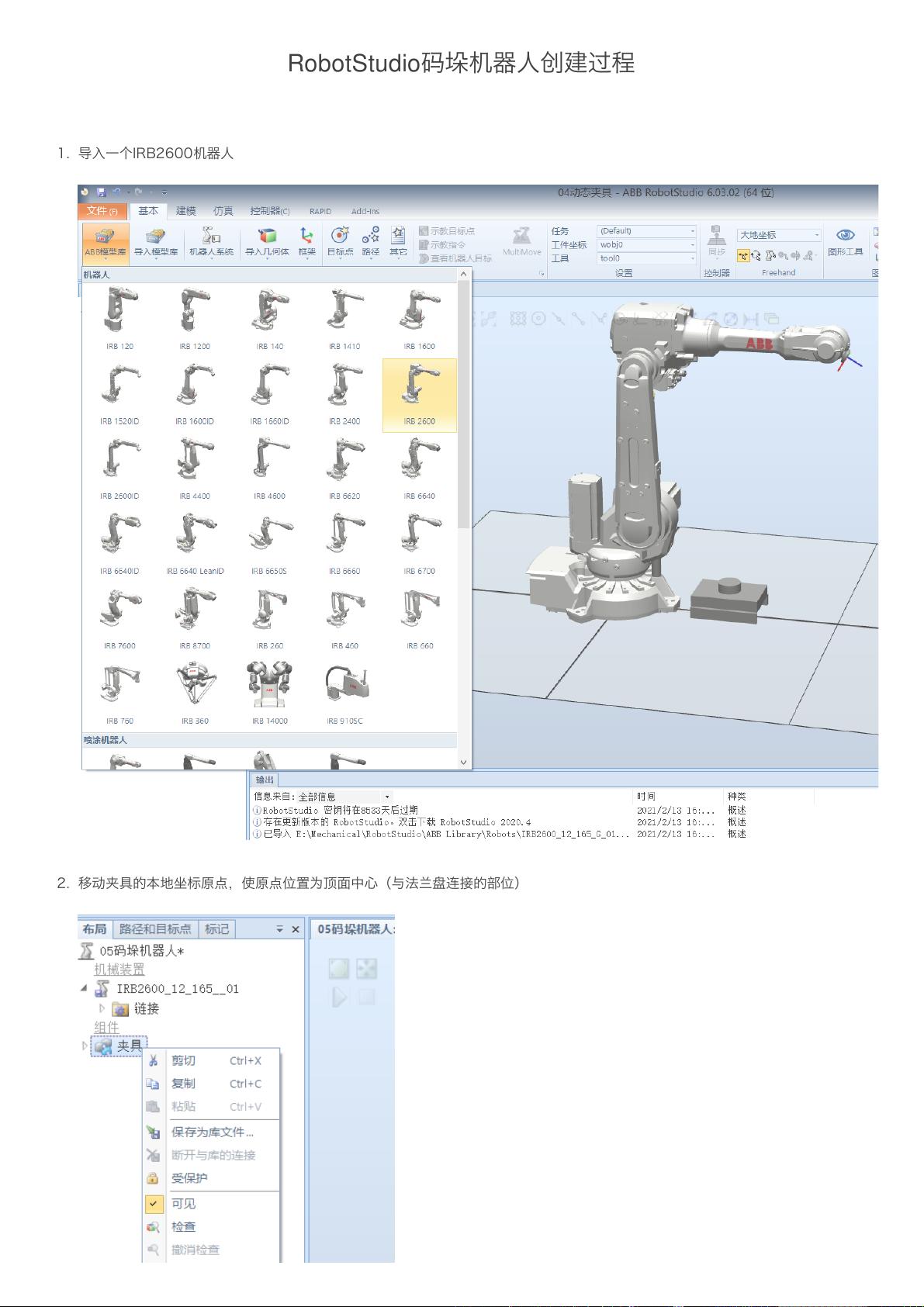
1. 导入IRB2600机器人模型:这是码垛系统的基础,IRB2600是一种灵活的六轴机器人。
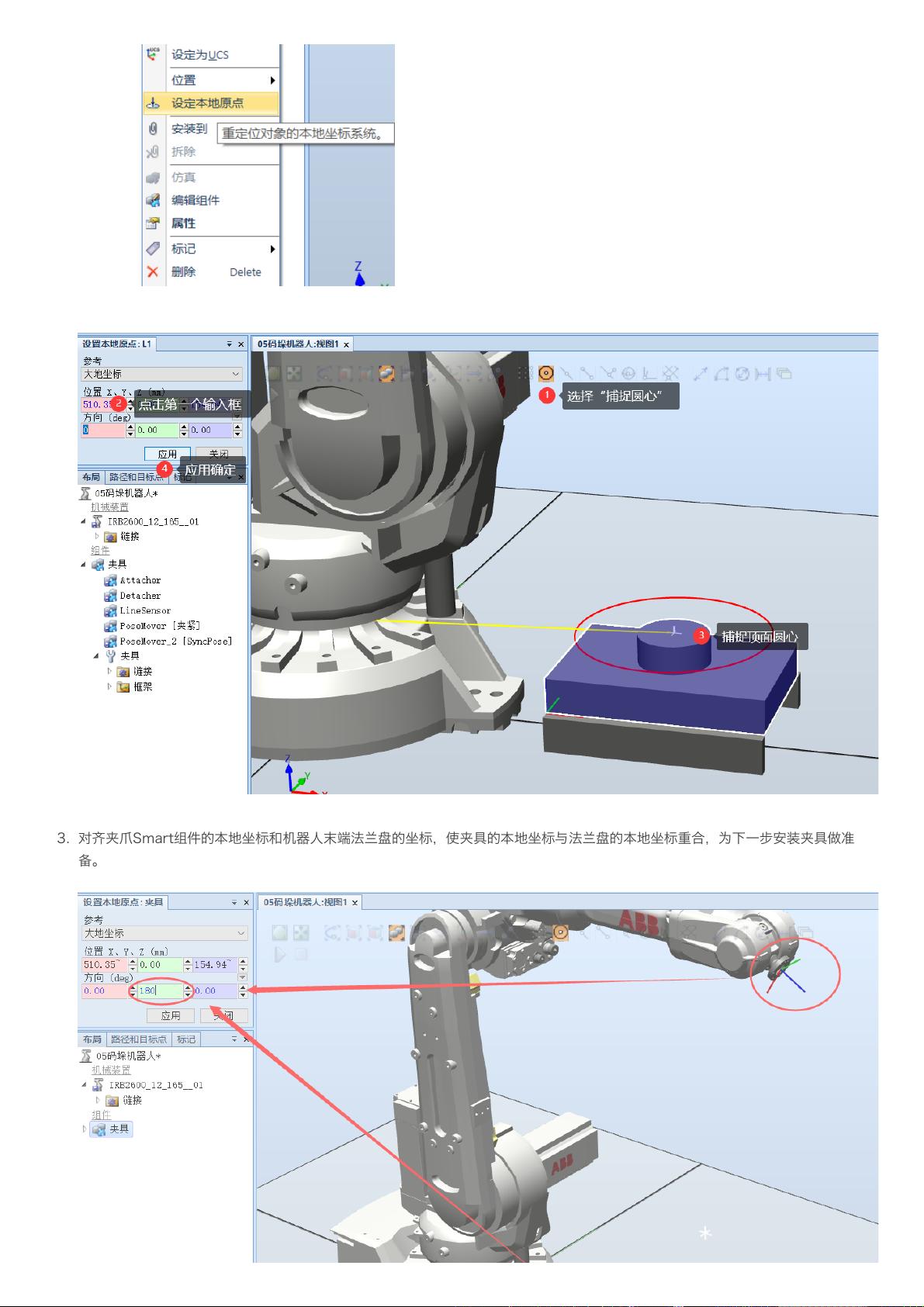
2. 设置夹具坐标原点:确保原点位于顶面中心,与法兰盘连接处对齐,便于后续操作。
3. 对齐坐标系:调整夹具Smart组件的本地坐标与机器人末端法兰盘坐标一致,以确保准确抓取。
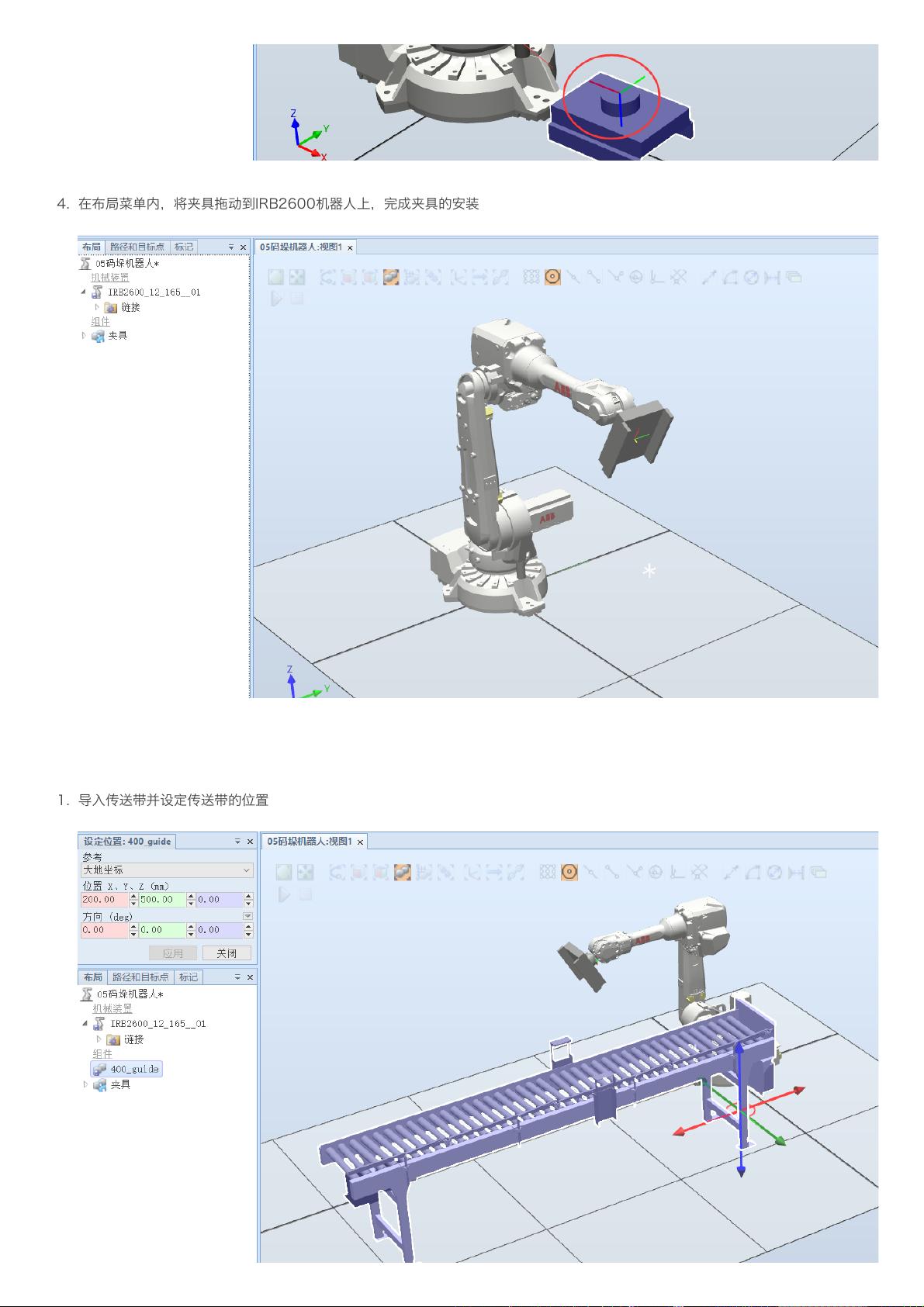
4. 使用布局菜单安装夹具:通过拖拽将夹具添加到机器人上,完成物理安装。
二、创建传送带
1. 导入传送带模型并设定位置:定义传送带在工作区域中的位置,以便物块能被正确传输。
2. 创建码垛物体:模拟要码垛的物品,并将其放置在传送带起点。
3. 创建Smart组件:通过此组件控制传送带物体的动态行为。
4. 配置组件参数:调整速度、方向等参数,确保物体按照预期运动。
三、创建码垛底盘
码垛底盘是码垛机器人放置货物的基础,它定义了码垛区域和码垛方式。
四、创建机器人系统
1. 选择特定选项:在仿真设定中去除机器人类的选中,可能是指禁用默认的机器人动作限制。
2. 捕捉目标点:运行仿真,使物块到达传感器,停止并记录多个目标点,以便处理不同的摆放姿势。
3. 旋转目标点:调整第三个目标点的Z轴角度,增加码垛的多样性。
4. 配置目标点参数:定义每个目标点的具体坐标和姿态。
5. 创建空路径:从机械原点出发,将所有目标点加入路径。
6. 同步到工作站:将路径更新到实际的工作站模型。
7. 删除临时物体:清除仿真过程中生成的多余物体。
8. 添加信号:创建到位信号和夹具信号,用于控制传送带和夹具的动作,重启控制器以应用更改。
9. 编写程序:在RAPID/T_ROB1下编写控制机器人的程序逻辑。
程序编写部分:
- 定义常量robtarget变量,存储不同目标点的坐标和姿态。
- 声明变量layer、x和z,分别表示码垛层数、X方向偏移和Z方向偏移。
- main()程序循环执行码垛动作,包括开启和关闭夹具、关节运动和线性运动,根据层数和位置关系调整物体摆放位置。
通过以上步骤,用户可以在RobotStudio中创建一个完整的码垛机器人系统,进行模拟和调试,优化码垛流程,确保实际生产中的高效和准确。这个过程涵盖了从硬件安装到软件编程的各个方面,是实现自动化码垛的重要步骤。


 m0_693056272024-03-28资源是宝藏资源,实用也是真的实用,感谢大佬分享~
m0_693056272024-03-28资源是宝藏资源,实用也是真的实用,感谢大佬分享~















