FANUC机器人PAYLOAD设置.doc
版权申诉
114 浏览量
2023-02-27
20:37:18
上传
评论
收藏 93KB DOC 举报

FANUC 机器人 PAYLOAD 设置
附件八 机器人 PAYLOAD 设置
1、概述
机器人的有效负载是指机器人法兰盘上工具和工件的重量.如果在软件安装时没有设置正
确的机器人有效负载或者由于更换法兰盘上的工具或工件而引起的有效负载改变,必须设置机
器人的有效负载。
最多可以设置 10 个有效负载列表,通过有效负载设置界面和使用示教程序指令来指定负载,
在 MOTION PERFORMANCE 界面下设置有效负载列表。
2、设置当前有效负载进度表
1)手动设置当前有效负载进度表
条件:
� SRDY 置 on
� 没有运动命令
� $PARAM_GROUP[].$MOUNT_ANGLE 没有被设置
� 机器人 mastering/calibration 已经完成
步骤:
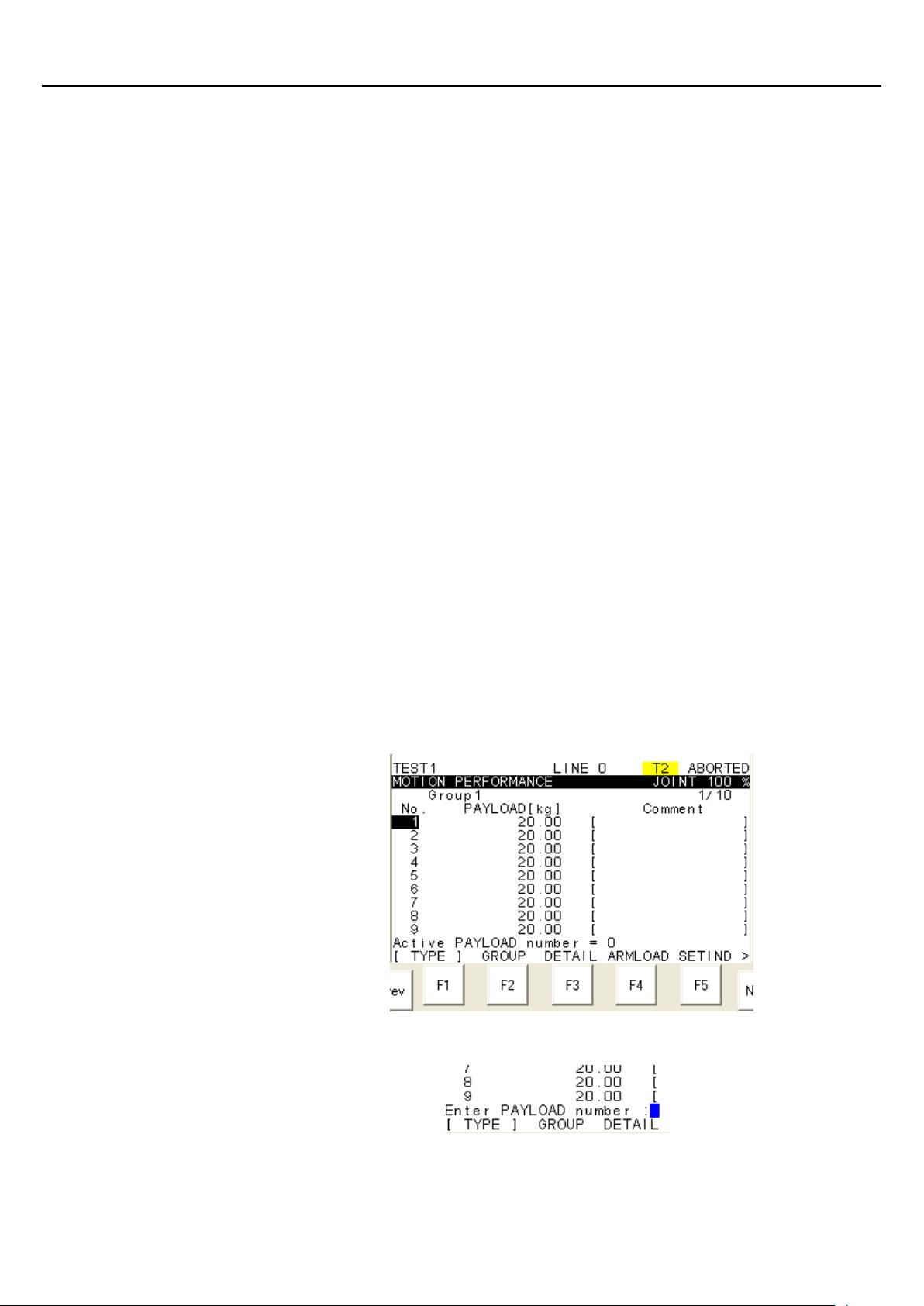
1、MENUS———-SYSTEM-—--F1 [TYPE]
———- Motion,进入图 1 所示界面:
图 1
2、按 F5 SETIND,出现图 2 界面,
输入要激活的有效负载的号码,
然后回车来确认
图 2
资源评论













