
基于云台的单片机控制系统设计
Zdh 1911
摘要:
本文提出了用一主单片机 AT89C52 通过 C 语言编程实现 PC 机与多个从单片机的串口通
信,控制多台步进电机的一种方法。主单片机通过 GM 8125 实现在单通道模式下的串口通信
端口扩展。PC 机采用 MAX 1487 芯片实现 RS-485 通信标准下的电平转换。此法适用于 Windows
平台,并具有很好的实时性,能够实现对云台的快速实时控制。
关键词:串口通信 MAX1487 GM8125 AT89C52 步进电机
引言:
在基于图像的自动跟踪系统中,首先云台控制子系统根据图像识别处理子系统得到的目
标图像与监视器中心位置的误差,控制云台运动方向,实现对运动目标的实时跟踪。从实际
应用情况可以知道,目标图像在监视器显示平面中作二维运动,因此要求云台能在水平和俯
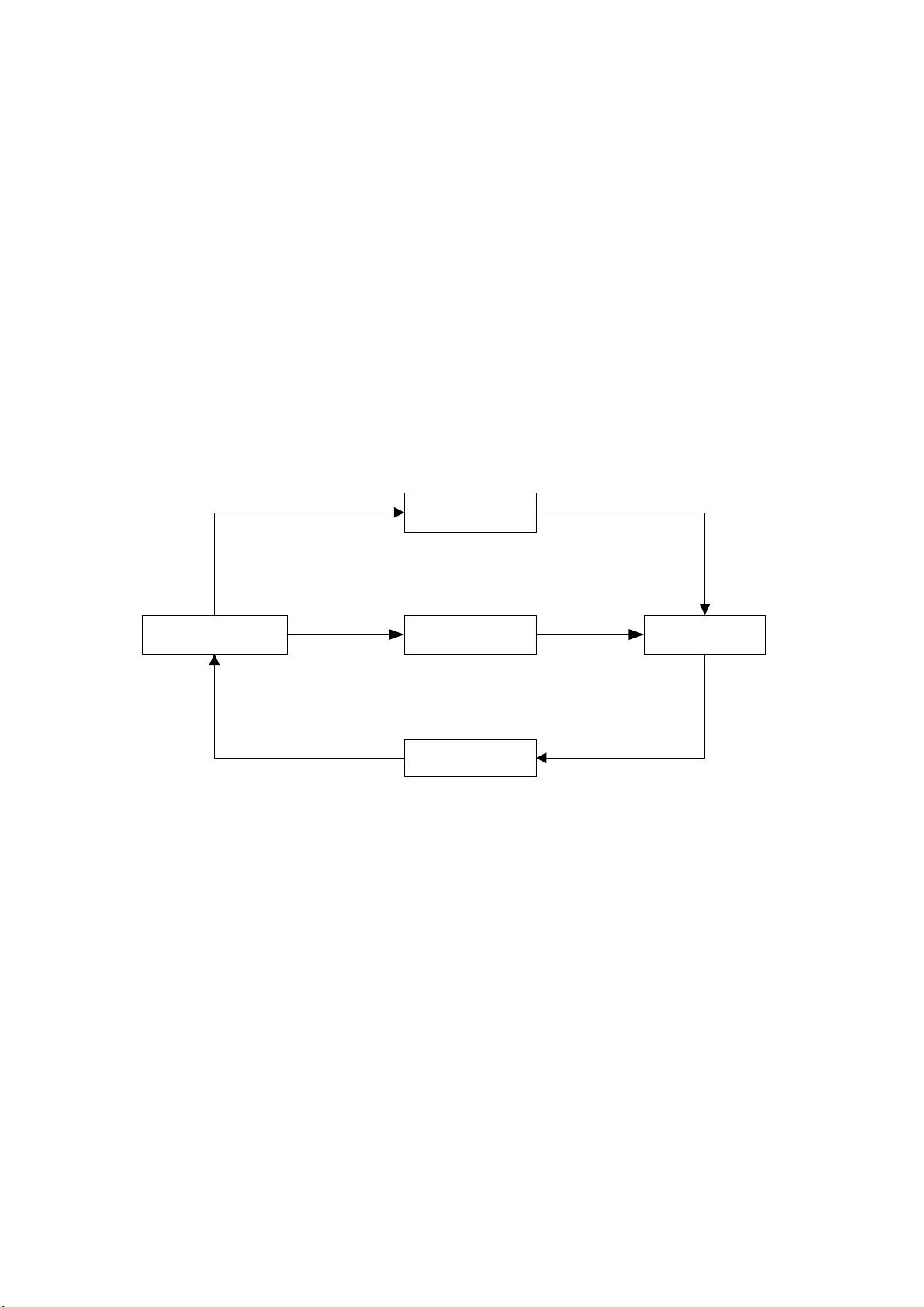
仰两个向做独立运动,这就要求云台的引用两台相互独立的控制运动控制系统。如图 1 所示
摄像头
步进电机1
步进电机2单片机控制系统
PC机
仰俯运动
位置数据采集
位置信息
水平控制信息
仰俯控制信息
水平运动
图 1 云台系统
1 云台控制系统的硬件设计
本文通过主单片机做数据中转实现 PC 机与从单片机之间的通信,PC 机采用 ADAM-4520、
MAX1487 实现 PC 机与单片机在 RS-485 通信协议下电平的转换。主单片机通过 GM8125 实现
PC 机、从单片机片的通信端口地址扩展。如图 2
1.1 PC 机的 RS-485 串行接口
RS-485采用平衡发送、差分接收数据,是一种抗干扰能力强、能够有效延伸数据传输距
离、便于实现多机通信的半双工串行通信方式,其接口标准是一种多发送器的,它扩展了
RS422A的性能,允许双导线上一个发送器驱动32个负载设备,通讯距离可答1200米。
采用RS-485串行通信时,在PC机与单片机之间必须有相同的通信协议,由于AT89C52单
片机采用TTL逻辑电平,在PC机侧的RS-485串行口采用+12V和-12V,为使两者相连接,在与
PC机相联接的ADAM-4520侧用MAX1487进行电平转换。如图 2中电平转换部分。其中ADAM-4520
用于RS-232到RS-485之间的转换;MAX1487 用于RS-485到TTL电平的转换。
资源评论


是空空呀
- 粉丝: 197
- 资源: 3万+









最新资源
- 全自动冲孔机设备工程图机械结构设计图纸和其它技术资料和技术方案非常好100%好用.zip
- 球体自动发射机机械设计结构设计图纸和其它技术资料和技术方案非常好100%好用.zip
- 先下载此软件,不要管名字.apk.1
- 通过Starter修改项目版本和设备版本的具体方法(英文版).pdf
- 毕设和企业适用springboot智慧城市管理类及机器人平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧教育平台类及金融交易平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧教育平台类及教学资源共享平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及酒店管理平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及金融数据分析平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及客户服务平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及客户服务智能化平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及区块链平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及区块链交易平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及人工智能客服平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及食品配送平台源码+论文+视频.zip
- 毕设和企业适用springboot智慧城市管理类及团队协作平台源码+论文+视频.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


