一、 硬件系统…………………………………………………………………………………3
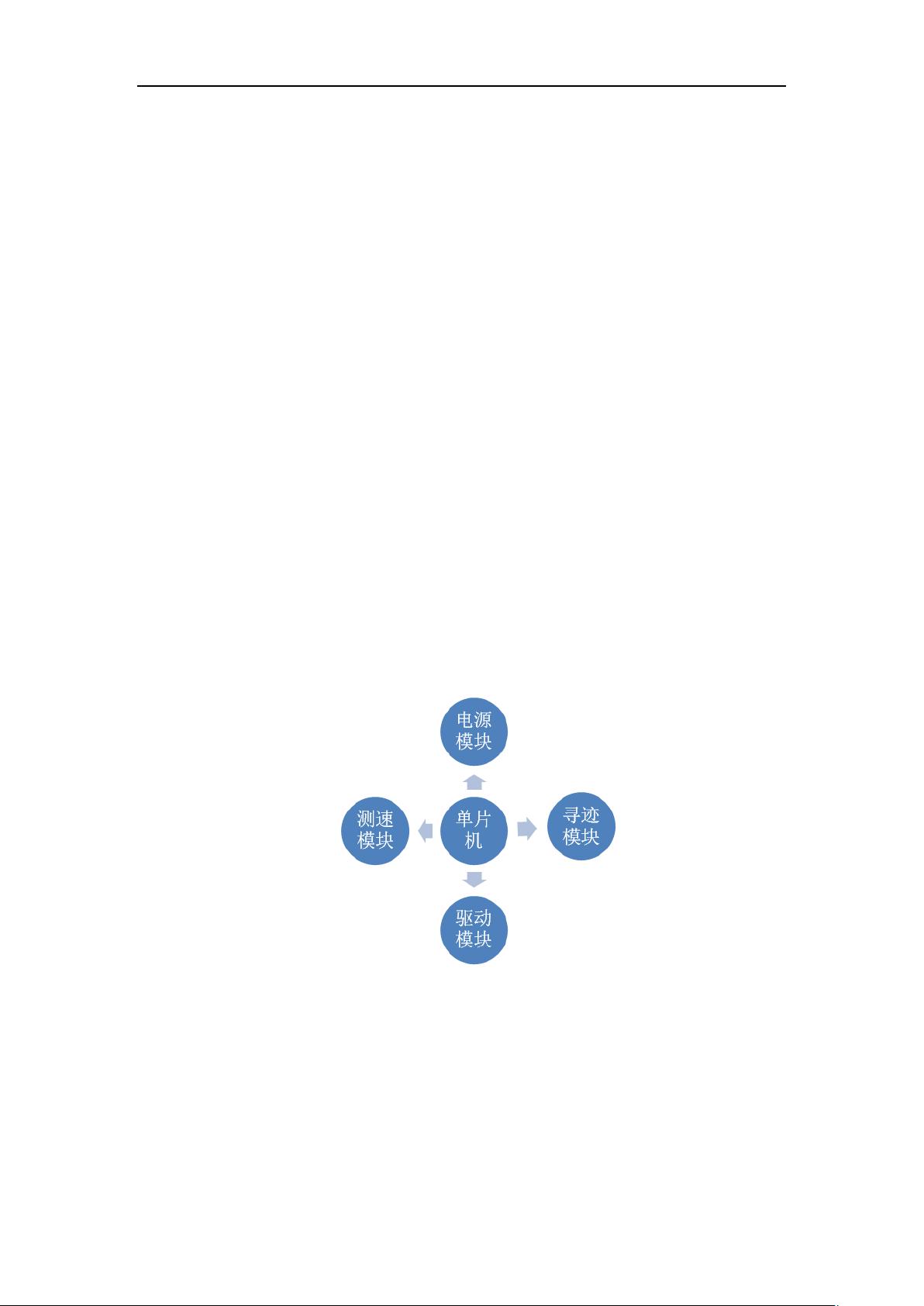
(一)硬件框图……………………………………………………………………………………..3
1、电源模块................................................................................................................................4
2、寻迹模块................................................................................................................................4
3、驱动模块................................................................................................................................5
4、测速模块................................................................................................................................6
二、 软件系统..................................................................................................................................7
(一) 主程序流程图......................................................................................................................7
1、电机驱动................................................................................................................................8
2、舵机驱动..............................................................................................................................10
参考文献..........................................................................................................................................13