从单片机菜鸟走向单片机工程师.doc
41 浏览量
2022-12-23
08:54:37
上传
评论
收藏 248KB DOC 举报

从单片机菜鸟走向单片机工程师
第一章节
从这一章开始,我们开始迈入单片机的世界。在我们开始这一章具体的学习之前,有必要给大家先说明一
下。在以后的系列文章中,我们将以 51 内核的单片机为载体,C 语言为编程语言,开发环境为 KEIL uv3。
至于为什么选用 C 语言开发,好处不言而喻,开发速度快,效率高,代码可复用率高,结构清晰,尤其是
在大型的程序中,而且随着编译器的不断升级,其编译后的代码大小与汇编语言的差距越来越小。而关于 C
语言和汇编之争,就像那个啥,每隔一段时间总会有人挑起这个话题,如果你感兴趣,可以到网上搜索相
关的帖子自行阅读。不是说汇编不重要,在很多对时序要求非常高的场合,需要利用汇编语言和 C 语言混
合编程才能够满足系统的需求。在我们学习掌握 C 语言的同时,也还需要利用闲余的时间去学习了解汇编
语言。
1.从点亮 LED(发光二极管)开始
在市面上众多的单片机学习资料中,最基础的实验无疑于点亮 LED 了,即控制单片机的 I/O 的电平的变化。
如同如下实例代码一般
void main(void)
{
LedInit() ;
While(1)
{
LED = ON ;
DelayMs(500) ;
LED = OFF ;
DelayMs(500) ;
}
}
程序很简单,从它的结构可以看出,LED 先点亮 500MS,然后熄灭 500MS,如此循环下去,形成的效
果就是 LED 以 1HZ 的频率进行闪烁。下面让我们分析上面的程序有没有什么问题。
看来看出,好像很正常的啊,能有什么问题呢?这个时候我们应该换一个思路去想了。试想,整个程序除
了控制 LED = ON ; LED = OFF; 这两条语句外,其余的时间,全消耗在了 DelayMs(500)这两个
函数上。而在实际应用系统中是没有哪个系统只闪烁一只 LED 就其它什么事情都不做了的。因此,在这里
我们要想办法,把 CPU 解放出来,让它不要白白浪费 500MS 的延时等待时间。宁可让它一遍又一遍的扫描
看有哪些任务需要执行,也不要让它停留在某个地方空转消耗 CPU 时间。
从上面我们可以总结出
(1) 无论什么时候我们都要以实际应用的角度去考虑程序的编写。
(2) 无论什么时候都不要让 CPU 白白浪费等待,尤其是延时(超过 1MS)这样的地方。
下面让我们从另外一个角度来考虑如何点亮一颗 LED。
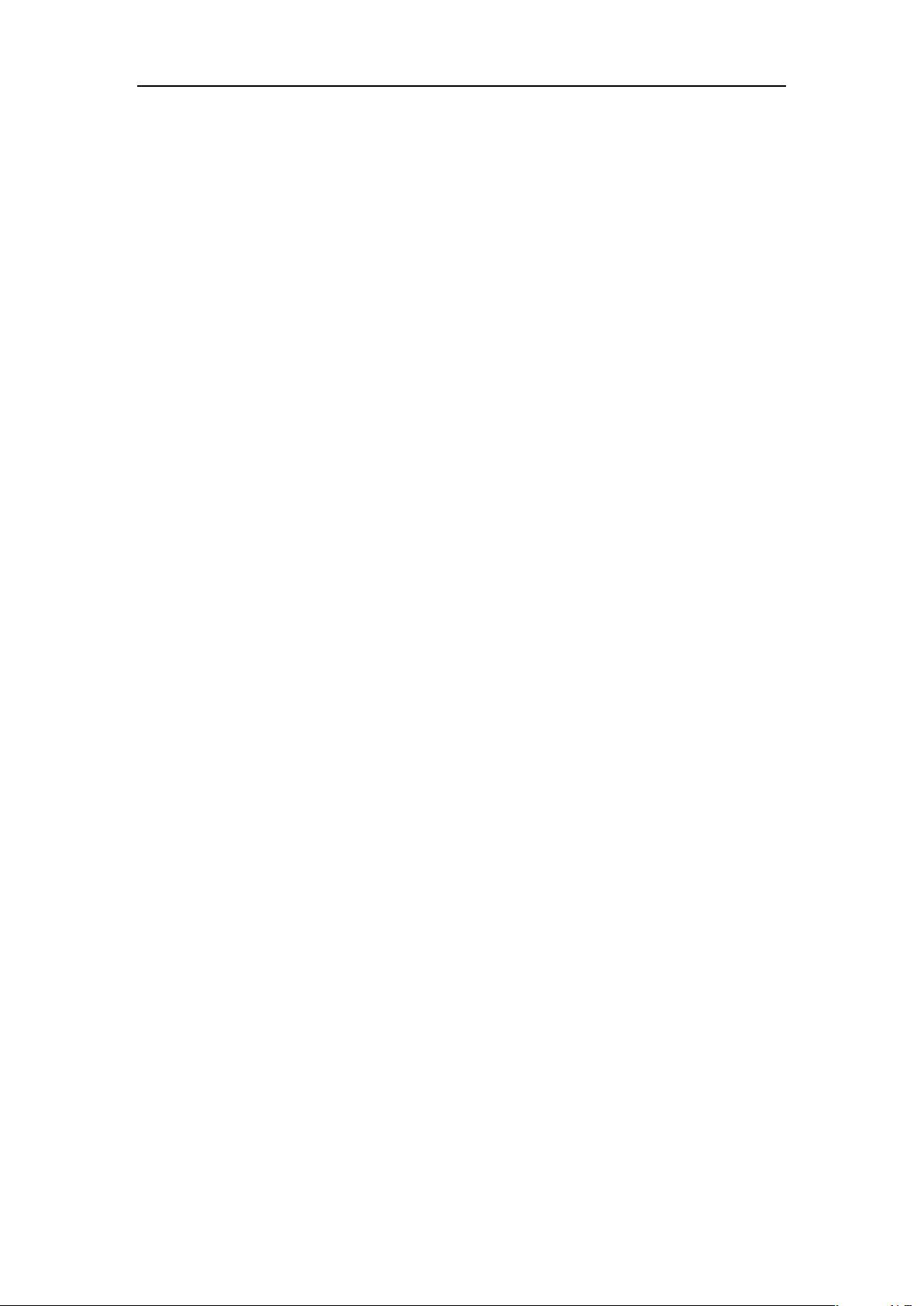
先看看我们的硬件结构是什么样子的。
我手上的单片机板子是电子工程师之家的开发的学习板。就以它的实际硬件连接图来分析吧。如
下图所示


剩余19页未读,继续阅读
资源评论













