程序: #include <at89x51.h> //包含51单片机相关的头文件 sbit LeftLed=P2^0; //定义前方左侧指示灯端口 sbit RightLed=P0^7; //定义前方右侧指示灯端口 sbit LeftIR=P3^5; //定义前方左侧红外探头端口 sbit RightIR=P3^6; //定义前方右侧红外探头端口 sbit FontIR=P3^7; //定义前方正前方红外探头端口 sbit M1A=P0^0; //定义左侧电机驱动A端 sbit M1B=P0^1; //定义左侧电机驱动B端 sbit M2A=P0^2; //定义右侧电机驱动A端 sbit M2B=P0^3; //定义右侧电机驱动B端 sbit B1=P0^4; //定义语音识识别传感器端口 sbit SB1=P0^6; //定义蜂鸣器端口 #define RunShow P1 //定义数据显示端口 void Delay() //定义机器人调转子时间子程序 { unsigned int DelayTime=50000; //定义机器人转弯时间变量 while(DelayTime--);
8单片机,通常指的是基于8位微处理器的微型计算机系统,主要用于嵌入式系统设计。在这个场景中,我们看到的代码是针对AT89X51单片机的编程,这是一种广泛应用的C51语言编写的程序。下面将详细解释程序中的关键知识点:
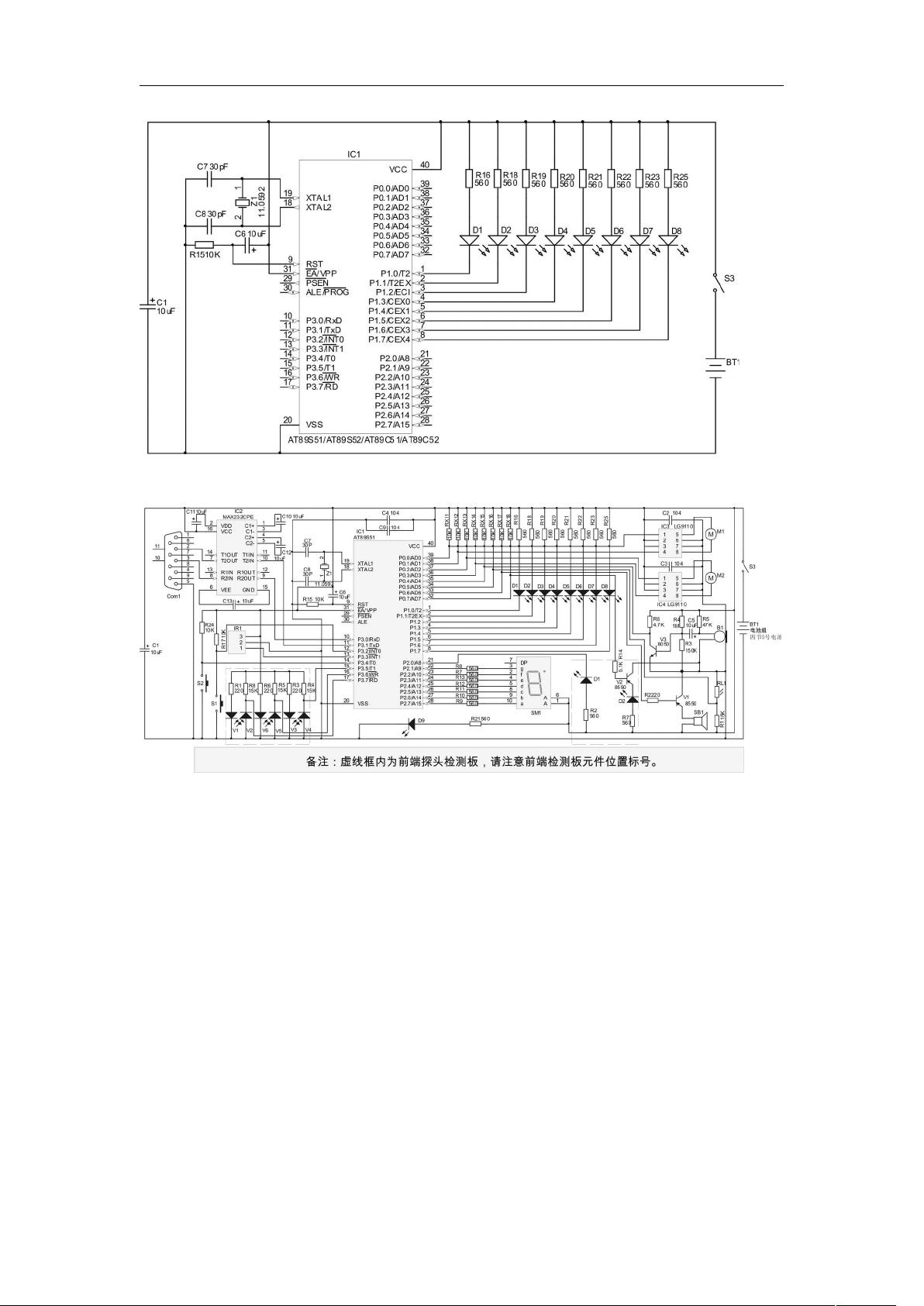
1. **头文件包含**:`#include <at89x51.h>` 包含了与AT89X51单片机相关的头文件,提供了对单片机硬件寄存器和功能的访问。
2. **特殊功能寄存器(SFR)定义**:程序通过`sbit`关键字定义了一些特殊功能寄存器,例如`LeftLed`、`RightLed`等,它们是P2、P0和P3端口上的特定位,用于控制硬件设备如指示灯、红外探头和电机驱动。
- `LeftLed = P2^0`: 定义前方左侧指示灯,连接到P2口的第0位。
- `RightLed = P0^7`: 定义前方右侧指示灯,连接到P0口的第7位。
- `LeftIR = P3^5`: 定义前方左侧红外探头,连接到P3口的第5位。
- `RightIR = P3^6`: 定义前方右侧红外探头,连接到P3口的第6位。
- `FontIR = P3^7`: 定义前方正前方红外探头,连接到P3口的第7位。
- `M1A = P0^0`: 定义左侧电机驱动A端,连接到P0口的第0位。
- `M1B = P0^1`: 定义左侧电机驱动B端,连接到P0口的第1位。
- `M2A = P0^2`: 定义右侧电机驱动A端,连接到P0口的第2位。
- `M2B = P0^3`: 定义右侧电机驱动B端,连接到P0口的第3位。
- `B1 = P0^4`: 定义语音识别传感器端口,连接到P0口的第4位。
- `SB1 = P0^6`: 定义蜂鸣器端口,连接到P0口的第6位。
3. **定义显示端口**:`#define RunShow P1` 将P1端口定义为数据显示端口,用于显示机器人状态或其他相关信息。
4. **延时子程序**:`void Delay()` 是一个简单的延时函数,用于实现一定的等待时间。它通过一个循环计数器`DelayTime`来实现,循环次数由`50000`次决定,这个数字可以调整以改变延迟时间。
5. **蜂鸣器控制**:在`Delay`函数内部,`SB1=!SB1;`这一行代码使得蜂鸣器闪响一次,通过翻转P0^6的电平状态来控制蜂鸣器的开关。
6. **电机控制子程序**:`void ControlCar(unsigned char ConType)` 根据`ConType`参数的值控制电机的运行方向。这里定义了五种模式:
- `case 1:` 前进:设置M1和M2电机的A端为低电平,使电机正转。
- `case 2:` 后退:设置M1和M2电机的B端为低电平,使电机反转。
- `case 3:` 左转:仅设置M2电机的A端为低电平,使机器人向左转。
- `case 4:` 右转:设置M1电机的A端为低电平,M2电机的B端为高电平,使机器人向右转。
- `case 8:` 停止:所有电机端口设为高电平,电机停止。
这些知识点构成了一个基础的8单片机控制系统,包括输入输出接口的定义、电机控制以及简单的延迟和反馈机制。这样的系统常用于小型机器人或自动装置,通过红外探头感知周围环境,并根据程序逻辑做出相应的动作。