
CC2541
www.ti.com.cn
ZHCS708D –JANUARY 2012–REVISED JUNE 2013
2.4-GHz Bluetooth™ 低低能能耗耗和和私私有有片片载载系系统统
查查询询样样品品: CC2541
1
特特性性
23
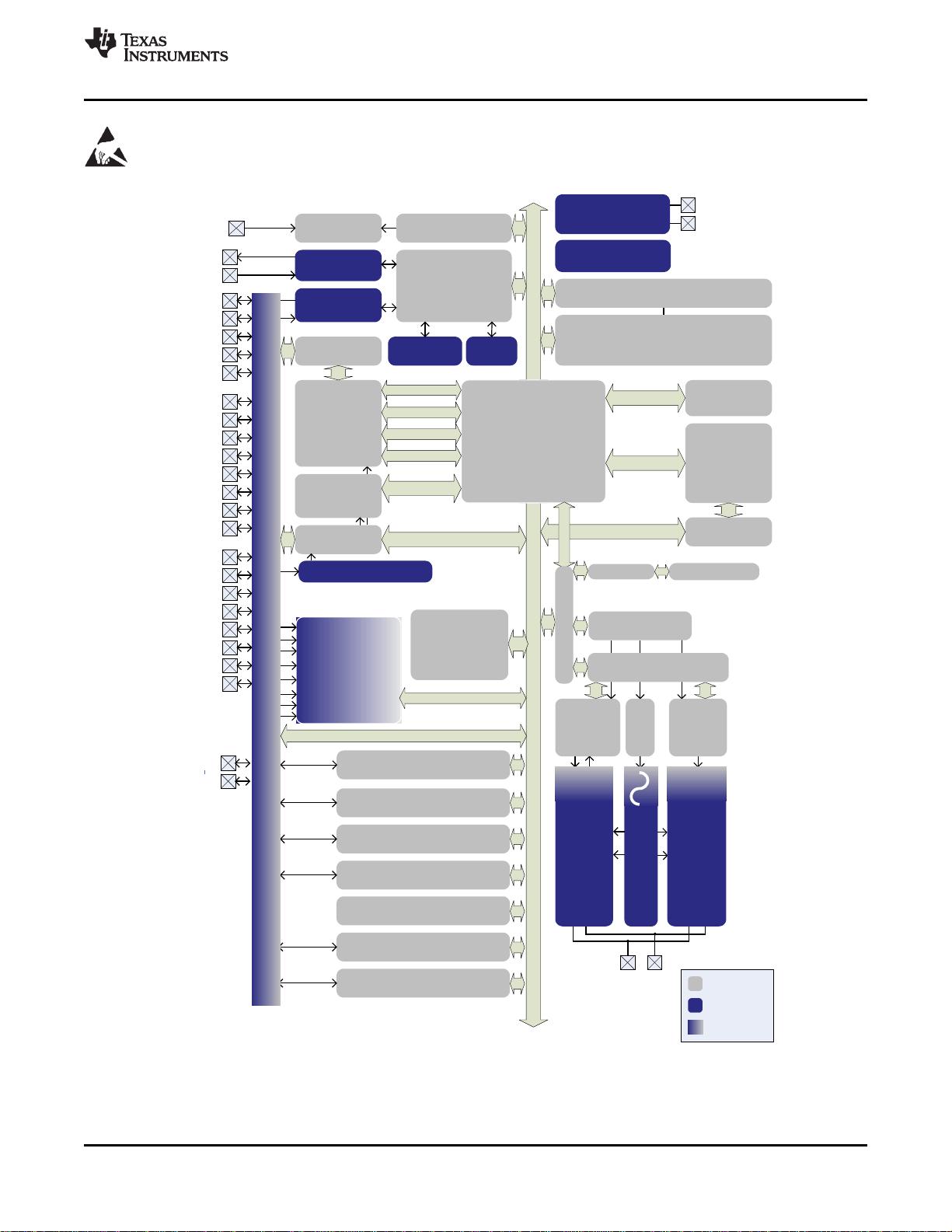
• 射射频频
空空格格
– 2.4-GHz Bluetooth 符符合合低低能能耗耗规规范范和和私私有有的的 • 微微控控制制器器
RF 片片载载系系统统
– 具具有有代代码码预预取取功功能能的的高高性性能能和和低低功功率率 8051 微微控控
– 支支持持 250-kbps,,500-kbps,,1-Mbps,,2-Mbps 制制器器内内核核
的的数数据据速速率率
– 系系统统内内可可编编程程闪闪存存,,128 或或者者 256 KB
– 出出色色的的链链路路预预算算,,不不使使用用外外部部前前段段而而支支持持长长距距离离
– 在在所所有有功功率率模模式式下下具具有有保保持持功功能能的的 8-KB RAM
应应用用
– 支支持持硬硬件件调调试试
– 高高达达 0 dBm 的的可可编编程程输输出出功功率率
– 扩扩展展基基带带自自动动化化,,包包括括自自动动确确认认和和地地址址解解码码
– 出出色色的的接接收收器器灵灵敏敏度度 ((1 Mbps 时时为为 –94
– 所所有有功功率率模模式式中中对对所所有有相相关关寄寄存存器器的的保保持持
dBm)),,可可选选择择性性,,和和阻阻挡挡性性能能
• 外外设设
– 适适合合于于针针对对符符合合世世界界范范围围内内的的无无线线电电频频率率调调节节系系
– 功功能能强强大大的的 5 通通道道直直接接内内存存访访问问 (DMA)
统统:: ETSI EN 300 328 和和 EN 300 440 2 类类
– 通通用用定定时时器器 ((1 个个 16 位位,,2 个个 8 位位))
((欧欧洲洲)),,FCC CFR47 15 部部分分((美美国国)),,和和
ARIB STD-T66 ((日日本本)) – 红红外外 (IR) 生生成成电电路路
• 布布局局 – 具具有有捕捕捉捉功功能能的的 32-kHz 睡睡眠眠定定时时器器
– 极极少少的的外外部部组组件件 – 精精确确数数字字接接收收到到的的数数字字信信号号强强度度指指示示器器 (RSSI)
支支持持
– 提提供供参参考考设设计计
– 电电池池监监视视器器和和温温度度传传感感器器
– 6-mm × 6-mm 方方形形扁扁平平无无引引脚脚 (QFN)-40 封封装装
– 含含 8 通通道道和和可可配配置置分分辨辨率率的的 12 位位模模数数转转换换器器
– 与与 CC2540 引引脚脚兼兼容容 ((当当不不使使用用 USB 或或者者 I
2
C
(ADC)
时时))
– 高高级级加加密密标标准准 (AES) 安安全全协协处处理理器器
• 低低功功率率
– 2 个个功功能能强强大大的的支支持持几几个个串串行行协协议议的的通通用用异异步步接接
– 工工作作模模式式 RX 低低至至:: 17.9 mA
收收发发器器 (UART)
– 工工作作模模式式 TX (0 dBm):: 18.2 mA
– 23 个个通通用用 I/O 引引脚脚
– 功功率率模模式式 1 ((4-µs 唤唤醒醒)):: 270 µA
(21 × 4 mA ,,2 × 20 mA)
– 功功率率模模式式 2 ((睡睡眠眠定定时时器器打打开开)):: 1 µA
– I
2
C 接接口口
– 功功率率模模式式 3 ((外外部部中中断断)):: 0.5 µA
– 2 个个具具有有 LED 驱驱动动功功能能的的 I/O 引引脚脚
– 宽宽泛泛的的电电源源电电压压范范围围 (2 V–3.6 V)
– 安安全全装装置置定定时时器器
• 工工作作模模式式下下 TPS62730 兼兼容容低低功功率率
– 集集成成的的高高性性能能比比较较器器
– RX 低低至至:: 14.7 mA ((3-V 电电源源))
• 开开发发工工具具
– TX (0 dBm)::14.3 mA ((3V 电电源源))
– CC2541 评评估估模模块块工工具具包包 (CC2541EMK)
空空格格
– CC2541 小小型型开开发发工工具具包包 (CC2541DK-MINI)
空空格格
空空格格
– SmartRF™ 软软件件
空空格格
– 提提供供 IAR 嵌嵌入入式式 Workbench™
空空格格
1
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
2Bluetooth is a trademark of Bluetooth SIG, Inc..
3ZigBee is a registered trademark of ZigBee Alliance.
PRODUCTION DATA information is current as of publication date.
版权 © 2012–2013, Texas Instruments Incorporated
Products conform to specifications per the terms of the Texas
Instruments standard warranty. Production processing does not English Data Sheet: SWRS110
necessarily include testing of all parameters.

剩余32页未读,继续阅读
资源评论


树下等苹果
- 粉丝: 4046
- 资源: 52









最新资源
- simulink 三机九节点系统风电调频,mppt运行下附有下垂控制和惯性控制,风电渗透率20%,带参考文献
- 西门子smart200plc与4台台达变频器modbus通讯 1,读写变频器的内部参数 2,控制变频器启停,读频率电流 3,设置变频器输出频率 4,有彩色接线图,和参数设置说明, 昆仑通泰触摸程序 有
- MATLAB环境下EMG信号降噪(去除心脏干扰)方法 算法运行环境为MAT;AB R2018a,执行MATLAB环境下EMG信号降噪(去除心脏干扰),采用概率自适应模板减法PATS,经验模态分解方法E
- 条形码检测 avt相机 halcon联合C++联合C#读条码源码 AVT的CCD相机飞拿采集图片,流水线上面运行,传感器感应条形码,相机采图,识别二维码,当读取二维码不联系后,开始通过串口控制输出点停
- 基于Windows.RTX64实时系统的仿真系统框架,用于分析工作时序(ns级),系统动态分析,集采集、分析、处理等于一体的多功能系统 可搭载光纤卡,图像卡,高速A D等板卡
- Simulink集成外部C语言实现PID功能,与Simulink自带pid模块功能一致 可直接进行DSP28335等的代码生成,拖过来直接用,加快开发进度 下图三显示这6种方式达到了基本一致的效果
- 分布式驱动电动汽车LQR DYC 直接横摆力矩控制 最优 规则扭矩分配控制pid计算纵向扭矩需求, 上层lqr计算 下层最小附着利用率分配 扭矩分配 效果优良 稳定性控制 操纵稳定性 matlab
- 四轮独立驱动电动汽车的车辆状态估计,分别采用无迹卡尔曼,容积卡尔曼,高阶容积卡尔曼观测器等,可估计包括纵向速度,质心侧偏角,横摆角速度,以及四个车轮角速度七个状态 模型中第一个模块是四轮驱动电机用f
- 开发板STM32 三轴联动 带插补 加减速 源代码 MDK 源码 分别基于STM32F1和STM32F4两套的三轴联动插补(直线圆弧两种带)加减速的源码,基于国外写的脱机简易雕刻机源码的项目修改,添加
- 三相电压型PWM整流器+双向buck boost matlab仿真 电压电流双闭环控制 dq变 波形完美 ps:可代做仿真
- 基于固定400Hz正弦信号注入的在线搜索永磁同步电机MTPA自动追踪运行的仿真,考虑了电感的饱和以及电机参数的变化,不需要电机的具体参数便可以自动寻求到最佳MTPA工作点,模型采用离散化的方式运行,与
- 基恩士KV7500 程序 ~ 基恩士KV7500系列程序,KV7500+KV-C64X+KV-C64T等输入输出模块,KV-XH16EC定位控制模块 检测机程序 松下A6系列总线控制伺服电机和总
- IronPython-2.6.2-Src-Net20.zip
- Labview条码追踪系统JKI+ AMC结合的框架,扩展性强,适用于各种项目
- PFC单轴压缩代码,非均质模型,包括声发射,根据裂纹数截图同时输出应力和位移云图数据,拉剪裂纹等
- IronPython-2.6.2-Net20.msi
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


