
A deep learning framework for remote sensing image registration
q
Shuang Wang
a
, Dou Quan
a
, Xuefeng Liang
b,
⇑
, Mengdan Ning
a
, Yanhe Guo
a
, Licheng Jiao
a
a
Key Laboratory of Intelligent Perception and Image Understanding of Ministry of Education, International Research Center for Intelligent Perception and Computation,
Xidian University, Xi’an, Shaanxi Province 710071, China
b
IST, Graduate School of Informatics, Kyoto University, Kyoto, Japan
article info
Article history:
Received 30 May 2017
Received in revised form 1 December 2017
Accepted 26 December 2017
Available online xxxx
Keywords:
Deep neural network
Image registration
Remote sensing image
Self-learning
Transfer learning
abstract
We propose an effective deep neural network aiming at remote sensing image registration problem.
Unlike conventional methods doing feature extraction and feature matching separately, we pair patches
from sensed and reference images, and then learn the mapping directly between these patch-pairs and
their matching labels for later registration. This end-to-end architecture allows us to optimize the whole
processing (learning mapping function) through information feedback when training the network, which
is lacking in conventional methods. In addition, to alleviate the small data issue of remote sensing images
for training, our proposal introduces a self-learning by learning the mapping function using images and
their transformed copies. Moreover, we apply a transfer learning to reduce the huge computation cost in
the training stage. It does not only speed up our framework, but also get extra performance gains. The
comprehensive experiments conducted on seven sets of remote sensing images, acquired by Radarsat,
SPOT and Landsat, show that our proposal improves the registration accuracy up to 2.4–53.7%.
Ó 2017 International Society for Photogrammetry and Remote Sensing, Inc. (ISPRS). Published by Elsevier
B.V. All rights reserved.
1. Introduction
Image registration is the process of geometrically aligning refer-
ence image and sensed image, which are about the same scene and
acquired at different times, even by different sensors or from dif-
ferent viewpoints (Zitova and Flusser, 2003; Jacqueline, 2017).
Image registration is a significant problem in remote sensing image
processing, which will directly influence the performance of the
follow-up works, such as image fusion, change detection, and envi-
ronmental monitoring.
In past decade, the remote sensing image registration problem
has been addressed by two types of methods: area-based methods
and feature-based methods(Zitova and Flusser, 2003). Area-based
methods search the optimal geometric transform parameters by
optimizing the images similarity, in which Mutual Information
(MI), Kullback-Leibler divergence, and normalized cross-
correlation (NCC) are widely accepted (Kern and Pattichis, 2007;
Suri and Reinartz, 2009; Parmehr et al., 2012; Liang et al., 2013;
Xu et al., 2016b). Although area-based methods can be easily
implemented, they are sensitive to intensity change, illumination
change and noise. On the contrary, the feature-based methods
overcome above defects and establish the geometric relation more
effectively via matching the salient features, such as points, lines,
and regions. In practice, SIFT (Lowe, 2004), SURF (Bay et al.,
2008), HOG (Dalal and Triggs, 2005), MSER (Matas et al., 2004),
Affine-SIFT (Morel and Yu, 2009) are commonly applied. Moreover,
other researches combine area-based methods and feature-based
methods for a coarse-to-fine image registration (Yong et al.,
2009; Ma et al., 2010; Goncalves et al., 2011; Gong et al., 2014).
The representative in feature-based methods is scale-invariant
feature transform (SIFT), because its feature descriptor is invariant
under translation, rotation, and scale change on normal images.
However, remote sensing images are generated by a complicated
imaging mechanism, whose appearance is determined by the radi-
ation characteristic, geometric characteristic of objects, and the
transmitting or receiving configuration of sensors. In registration
tasks, the reference image and sensed image may even come from
different sensors, have varied resolutions, spectral and so on
(Jacqueline, 2017). Due to the speciality of remote sensing images,
the invariants of SIFT designed for normal images may not be
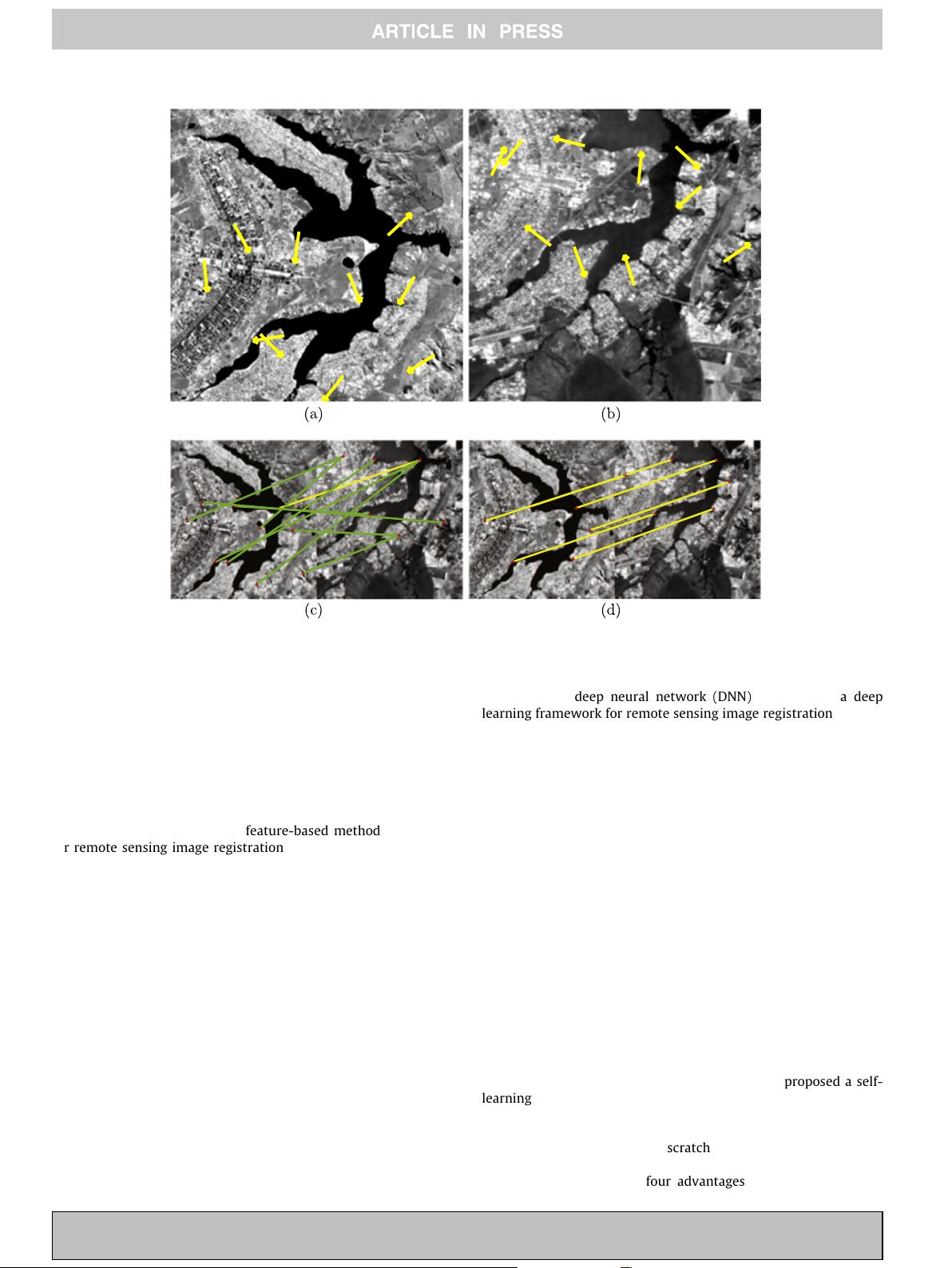
maintained on remote sensing images. Our experiments reveal that
the computed principal direction of SIFT keypoints becomes unre-
liable, because the statistic of gradients around the keypoint
severely varies. An example, Fig. 1(a) and (b) illustrates this prob-
lem. We select some strong SIFT points that should be matched
https://doi.org/10.1016/j.isprsjprs.2017.12.012
0924-2716/Ó 2017 International Society for Photogrammetry and Remote Sensing, Inc. (ISPRS). Published by Elsevier B.V. All rights reserved.
q
Special issue on Deep Learning for Remotely Sensed Data.
⇑
Corresponding author.
E-mail addresses: shwang.xd@gmail.com (S. Wang), xliang@i.kyoto-u.ac.jp
(X. Liang).
ISPRS Journal of Photogrammetry and Remote Sensing xxx (2018) xxx–xxx
Contents lists available at ScienceDirect
ISPRS Journal of Photogrammetry an d Remote Sensing
journal homepage: www.elsevier.com/locate/isprsjprs
Please cite this article in press as: Wang, S., et al. A deep learning framework for remote sensing image registration. ISPRS J. Photogram. Remote Sensing
(2018), https://doi.org/10.1016/j. isprsjprs.2017.12.012

剩余16页未读,继续阅读
资源评论

 丶沉默2019-01-07很有帮助,我很喜欢
丶沉默2019-01-07很有帮助,我很喜欢 cosine_2023-10-30非常有用的资源,可以直接使用,对我很有用,果断支持
cosine_2023-10-30非常有用的资源,可以直接使用,对我很有用,果断支持

成成安安
- 粉丝: 1
- 资源: 1









最新资源
- 音乐网站(JSP+SERVLET).rar
- 抢购软件:快速复制信息
- oracle错误代码和信息速查手册chm版最新版本
- MATLAB【逆变器二次调频模型】 微电网分布式电源逆变器DROOP控制二次调频模型,加入二次控制实现二次调频控制,及二次调压控制,程序可实现上图功能,工况有所改变 需要matlab2021A版
- 基于python的网页自动化工具项目全套技术资料100%好用.zip
- Oracle数据库命令速查手册doc版最新版本
- 程序名称:转向设计计算程序 开发平台:基于matlab平台 计算内容:阿克曼转角,转弯半径,转向阻力矩,回正力矩,转向主参数,转向传动比,力矩波动,转向梯形,EPS匹配,HPS匹配,齿轮齿条传动比,循
- 基于二阶自抗扰ADRC的轨迹跟踪控制,对车辆的不确定性和外界干扰具有一定抗干扰性,基于carsim和simulink仿真 跟踪轨迹为双移线,效果良好,有对应复现资料,是学习自抗扰技术快速入门很好的资料
- TianleSoftwareOracle学习手册中文pdf格式最新版本
- MATLAB代码:基于分布式ADMM算法的考虑碳排放交易的电力系统优化调度研究 关键词:分布式调度 ADMM算法 交替方向乘子法 碳排放 最优潮流 仿真平台:MATLAB+CPLEX GUROBI
- Oracle安装配置使用WORD文档doc格式最新版本
- 西门子840D HMI ADVANCED FOR PC 也可用于810D,840DSL中文版 1、软件可安装到台式机或笔记本上,可以连接到机床的NCU进行NC与PLC的数据备份与恢复,备份和恢复的数
- OraclePLSQL简单安装指南WORD文档doc格式最新版本
- 网页数据采集软件项目全套技术资料100%好用.zip
- Oracle高级SQL培训与讲解WORD文档doc格式最新版本
- 超智能体写的人工智能深度学习pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


