
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/308277668
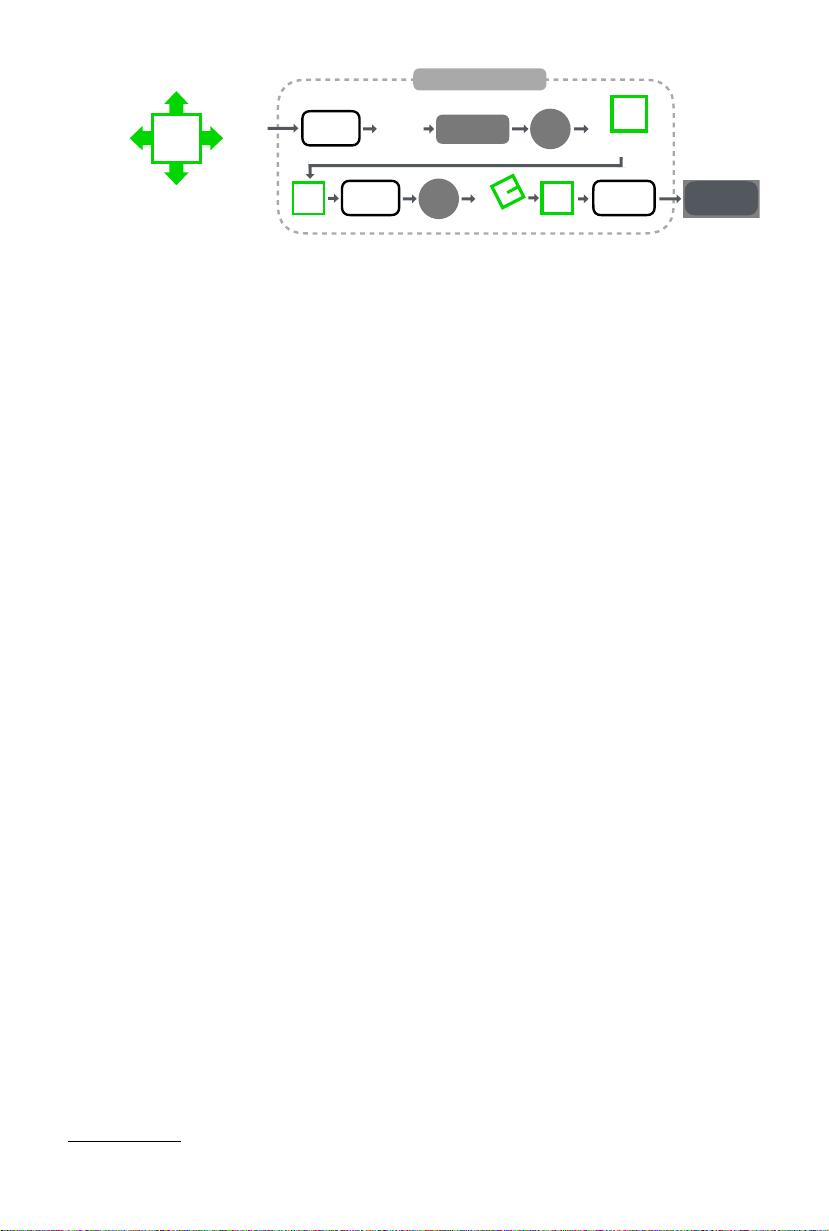
LIFT: Learned Invariant Feature Transform
Conference Paper · October 2016
DOI: 10.1007/978-3-319-46466-4_28
CITATIONS
81
READS
664
4 authors, including:
Some of the authors of this publication are also working on these related projects:
Learning Descriptors for Object Recognition and 3D Pose Estimation View project
Electron imaging and 3D reconstruction of dislocations View project
Kwang Moo Yi
University of Victoria
38 PUBLICATIONS527 CITATIONS
SEE PROFILE
Vincent Lepetit
Université Bordeaux 1
199 PUBLICATIONS11,362 CITATIONS
SEE PROFILE
Pascal Fua
École Polytechnique Fédérale de Lausanne
597 PUBLICATIONS24,589 CITATIONS
SEE PROFILE
All content following this page was uploaded by Vincent Lepetit on 06 March 2018.
The user has requested enhancement of the downloaded file.

剩余16页未读,继续阅读
资源评论


Zero-lei
- 粉丝: 7
- 资源: 1









最新资源
- 基于Pygame库实现新年烟花效果的Python代码
- 浪漫节日代码 - 爱心代码、圣诞树代码
- 睡眠健康与生活方式数据集,睡眠和生活习惯关联分析()
- 国际象棋检测10-YOLO(v5至v9)、COCO、CreateML、Paligemma数据集合集.rar
- 100个情侣头像,唯美手绘情侣头像
- 自动驾驶不同工况避障模型(perscan、simulink、carsim联仿),能够避开预设的(静态)障碍物
- 使用Python和Pygame实现圣诞节动画效果
- 数据分析-49-客户细分-K-Means聚类分析
- 车辆轨迹自适应预瞄跟踪控制和自适应p反馈联合控制,自适应预苗模型和基于模糊p控制均在simulink中搭建 个人觉得跟踪效果相比模糊pid效果好很多,轨迹跟踪过程,转角控制平滑自然,车速在36到72
- 企业可持续发展性数据集,ESG数据集,公司可持续发展性数据(可用于多种企业可持续性研究场景)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


