
第 6 章 KUKA 机器人
实操实例
6 . 1 节 具 有外部 TC P 运动 编 程 的应用
应用功能描述
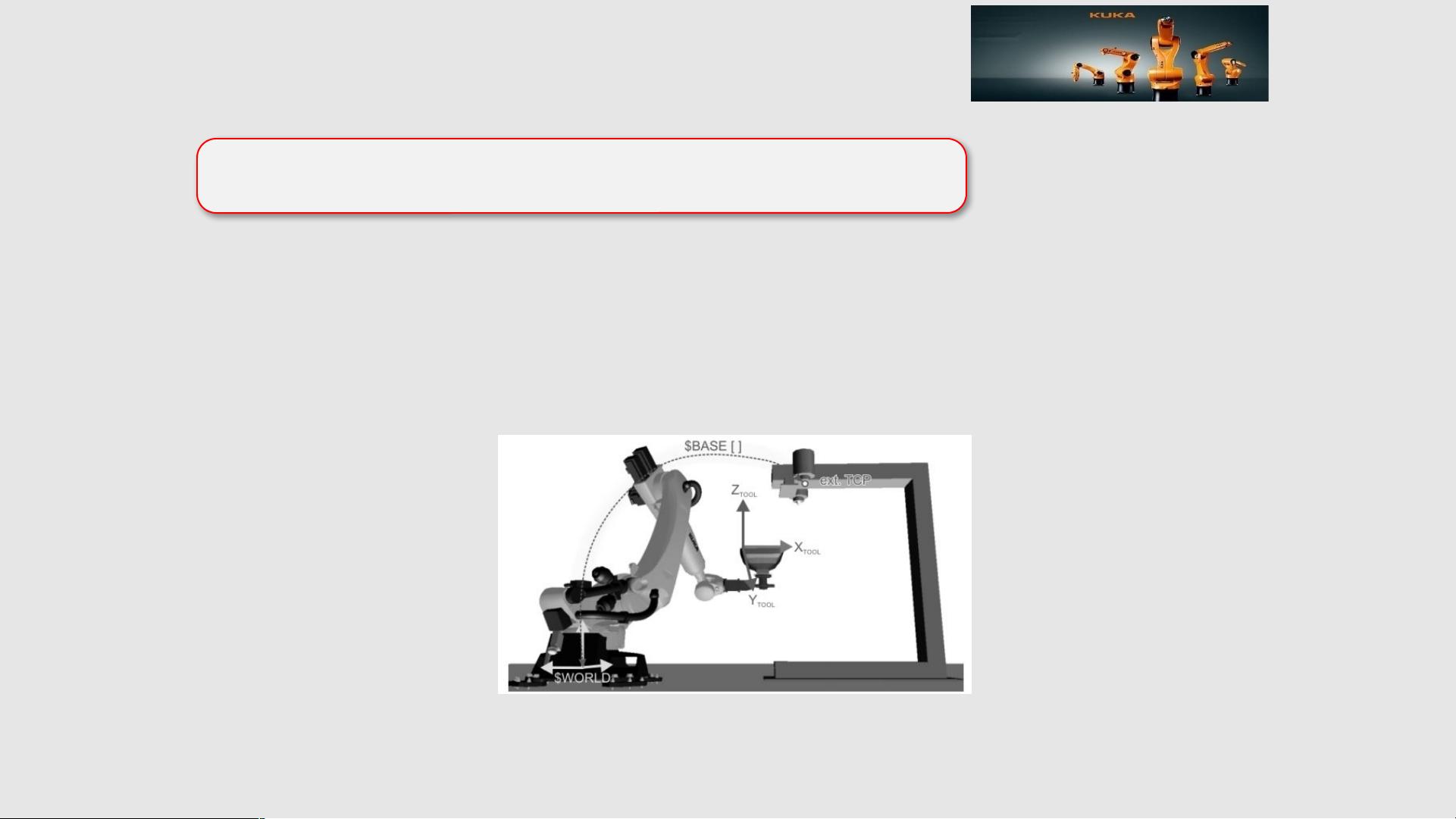
本应用针对一些需要抓取工件靠近外部固定工具或者固定物进行后续工
艺的生产情况。其效果图如下图所示。
第 1 页 / 共 13 页
剩余12页未读,继续阅读
资源评论


加油学习加油进步
- 粉丝: 1405
- 资源: 52万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 手势检测7-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 基于python flask实现某瓣数据可视化数据分析平台
- awewq1132323
- 手写流程图检测31-YOLO(v5至v8)、COCO、CreateML、Darknet、Paligemma、TFRecord数据集合集.rar
- frida拦截微信小程序云托管API
- 肝脏及其肿瘤分割的 CT 数据集,已经切片成jpg数据,约2w张数据和mask
- 基于Java的网上教务评教管理系统的设计与实现.doc
- 2024圣诞节海外消费市场趋势及营销策略分析报告
- JWaaaaaaaaaaaaaaaaaaaa
- Python实现常见排序算法详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


