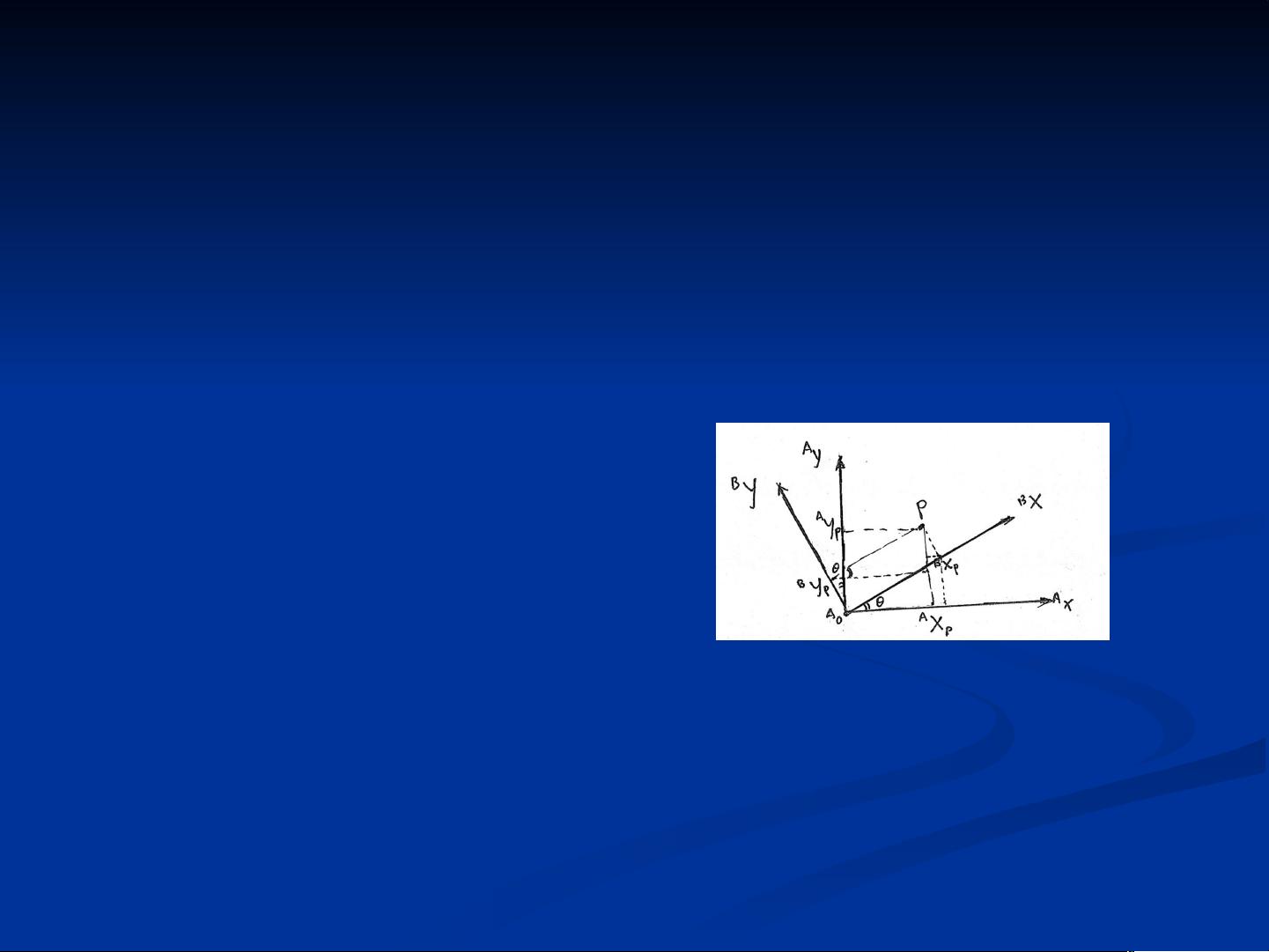
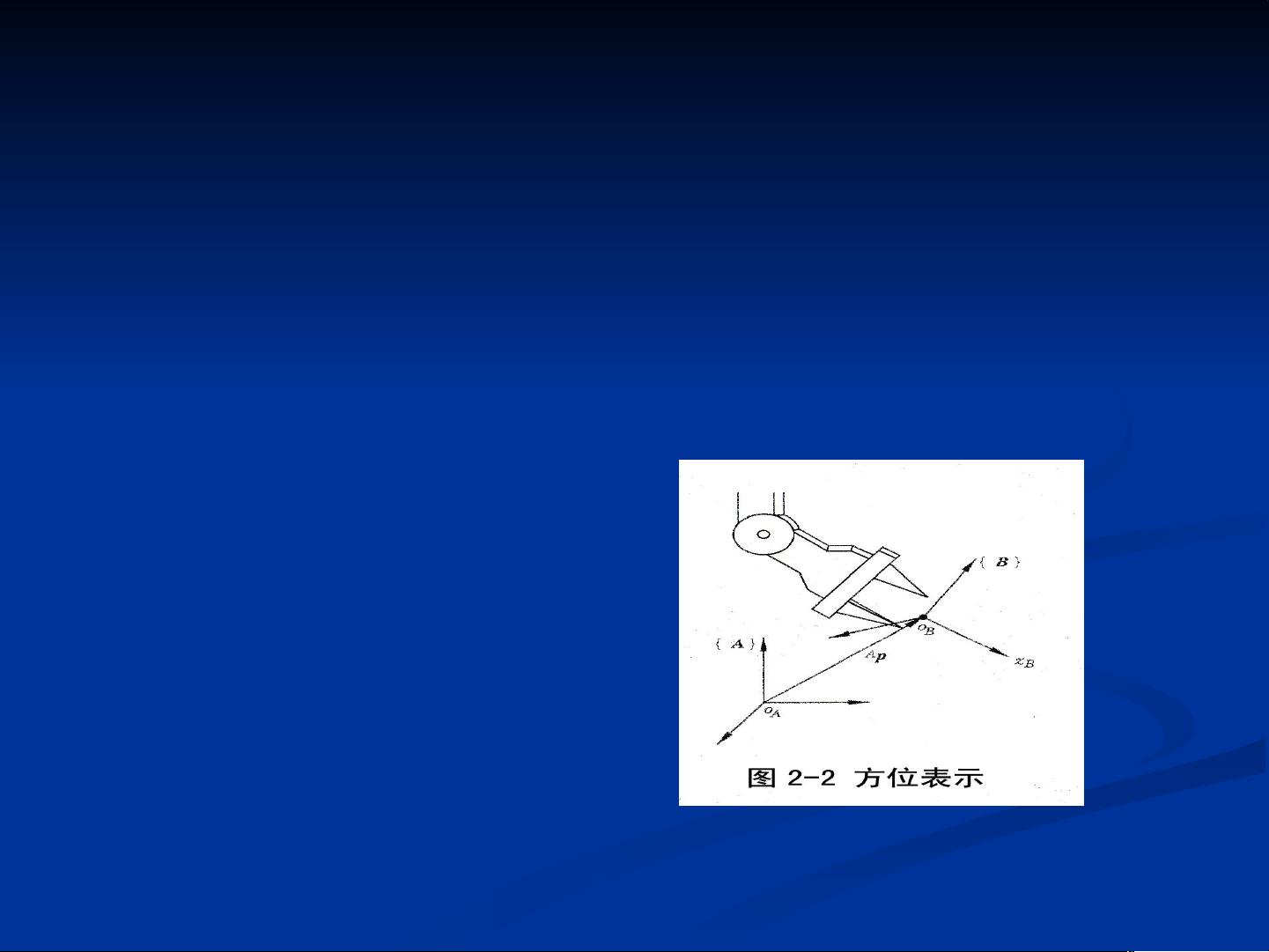
【机器人技术讲稿】主要涵盖了机器人技术的基础数学概念,特别是关于位置和姿态的表示以及坐标变换的原理。这部分内容对于理解和应用机器人技术至关重要。 在机器人技术中,位置和姿态的描述通常涉及到坐标系的转换。一个关键的概念是旋转矩阵,它是正交矩阵,用于描述一个坐标系相对于另一个坐标系的旋转。例如,绕x、y、z轴的旋转可以通过特定的旋转矩阵来表达。绕Z轴的旋转矩阵可以通过给定的角度θ来确定,其他两个轴的旋转只需调整坐标顺序即可得到相应的矩阵。 旋转矩阵在机器人学中有三个主要的几何意义: 1. 表示刚体上固定坐标系相对于参考坐标系的姿态。 2. 作为坐标变换矩阵,将一点在B坐标系中的坐标变换到A坐标系中。 3. 作为一个算子,将B坐标系中的矢量或物体变换到A坐标系中。 位姿描述不仅包括旋转,还包含刚体原点的位置。刚体的位置和姿态可以用方位矩阵(旋转矩阵)和原点的位置矢量共同表示。 坐标变换是机器人学中的核心概念,分为平移和旋转两种类型: 1. 平移变换:当两个坐标系方向相同,但原点不重合时,可以通过简单的向量加法来描述点的位置变化。 2. 旋转变换:如果坐标系原点相同,但方向不同,则需要使用旋转矩阵来表示点在不同坐标系中的位置关系。 3. 复合变换:当既有平移又有旋转时,需要将这两个变换组合起来进行。 齐次坐标变换是处理位置和姿态变换的另一种方法,它可以更简洁地表达复杂的几何变换。齐次变换矩阵将位置矢量扩展为四维,包含了位置和旋转的信息。平移齐次变换矩阵则明确地描述了坐标系沿各轴的平移。 举例来说,如果坐标系B先相对于A绕ZA轴旋转30度,然后沿XA轴移动12单位,再沿YA轴移动6单位,那么可以计算出B坐标系中点P在A坐标系中的位置,以及BA的旋转矩阵。 机器人技术中的数学基础涉及坐标系的表示、旋转和平移的矩阵运算,以及如何通过齐次坐标来简化这些变换。这些概念在设计、控制和编程机器人时都起着关键作用。
剩余50页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~