**Jacobi 迭代法**是一种在数值分析中用于求解大型线性方程组的迭代方法,由德国数学家卡尔·威廉·雅各比(Carl Wilhelm Jacobi)提出。这种方法特别适用于处理对角占优的矩阵,即矩阵中对角线元素的绝对值大于其相邻元素的绝对值。它在解决大规模问题时,由于其并行计算的潜力,成为了一种实用的工具。
**一、实验目的**
1. **熟悉 Matlab 基本操作**:Matlab 是一个强大的数值计算平台,提供友好的图形用户界面和丰富的数学函数库,用于进行矩阵运算、数据可视化和算法开发。
2. **掌握 Matlab 基本代码编程**:Matlab 采用面向数组的编程风格,使得处理矩阵和向量的操作变得简洁高效。
3. **理解 Jacobi 迭代法原理并实现**:通过编程实践,深入理解 Jacobi 迭代法的迭代过程和收敛特性。
**二、实验环境**
硬件环境:个人计算机(PC 机)
软件环境:Matlab —— 一种广泛用于科学计算和工程应用的交互式环境。
**三、算法原理**
Jacobi 迭代法基于以下假设,给定线性方程组:
\[ A \mathbf{x} = \mathbf{b} \]
其中,\( A \) 是 \( n \times n \) 矩阵,\( \mathbf{x} \) 和 \( \mathbf{b} \) 分别是 \( n \) 维列向量。对于对角占优的矩阵 \( A \),可以将 \( A \) 分解为:
\[ A = D - L - U \]
其中 \( D \) 是对角元素组成的矩阵,\( L \) 是下三角部分,\( U \) 是上三角部分。然后迭代公式可以写为:
\[ \mathbf{x}^{(k+1)} = D^{-1}(\mathbf{b} - (L + U)\mathbf{x}^{(k)}) \]
在实际计算中,为了避免直接计算矩阵的逆,可以使用以下迭代形式:
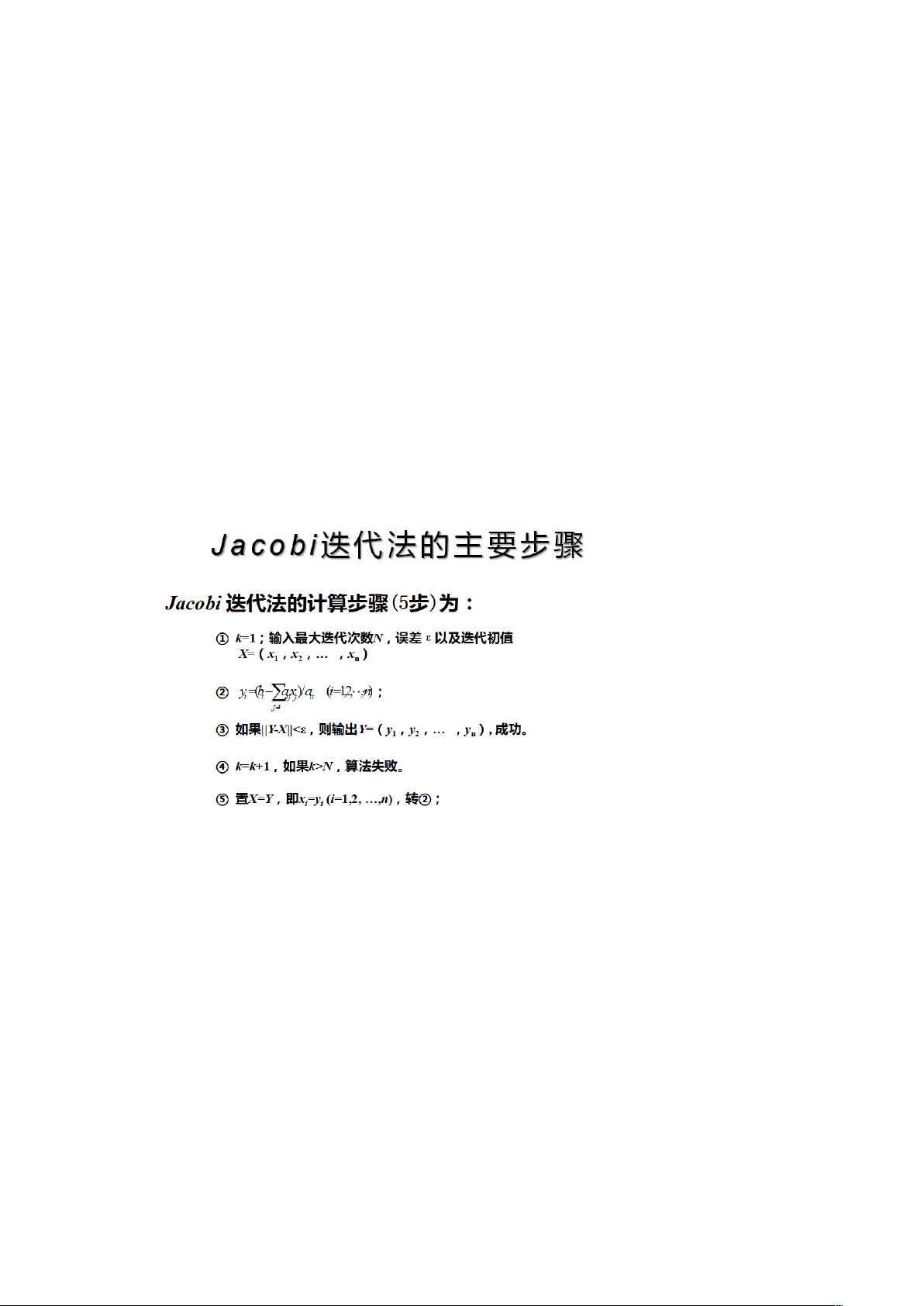
\[ x_i^{(k+1)} = \frac{1}{a_{ii}}(b_i - \sum_{j\neq i}a_{ij}x_j^{(k)}) \]
这里,\( a_{ij} \) 表示矩阵 \( A \) 中的元素,\( x_i^{(k)} \) 是第 \( k \) 次迭代得到的解的第 \( i \) 个分量。
**四、实验内容**
实验代码通常以 `.m` 脚本文件的形式编写,利用 Matlab 提供的循环结构和矩阵运算功能,实现 Jacobi 迭代法的计算。迭代过程会持续到解达到一定的精度或达到预设的最大迭代次数。
**五、实验总结**
Jacobi 迭代法的主要优点包括:
1. **计算简单**:每次迭代仅涉及矩阵和向量的乘法,操作相对简便。
2. **并行计算**:由于每个分量独立更新,易于实现并行化,提升计算效率。
然而,也存在以下缺点:
1. **收敛速度**:相比于其他迭代方法,如 Gauss-Seidel 方法,Jacobi 迭代法的收敛速度可能较慢。
2. **存储需求**:需要存储每次迭代的解向量,对于大规模问题,内存消耗可能较大。
3. **适用性**:只适用于对角占优的矩阵,对于非对角占优或者奇异矩阵,可能不收敛或收敛速度极慢。
通过本次实验,不仅巩固了 Matlab 编程技能,还深化了对 Jacobi 迭代法的理解,认识到在实际工程问题中,通常会使用 Jacobi 迭代法的改进版本,例如 Gauß-Seidel 或SOR(Successive Over-Relaxation)方法,以提高收敛性能和计算效率。














- 1
- 2
前往页