### SPH算法详解
#### 一、SPH算法概述
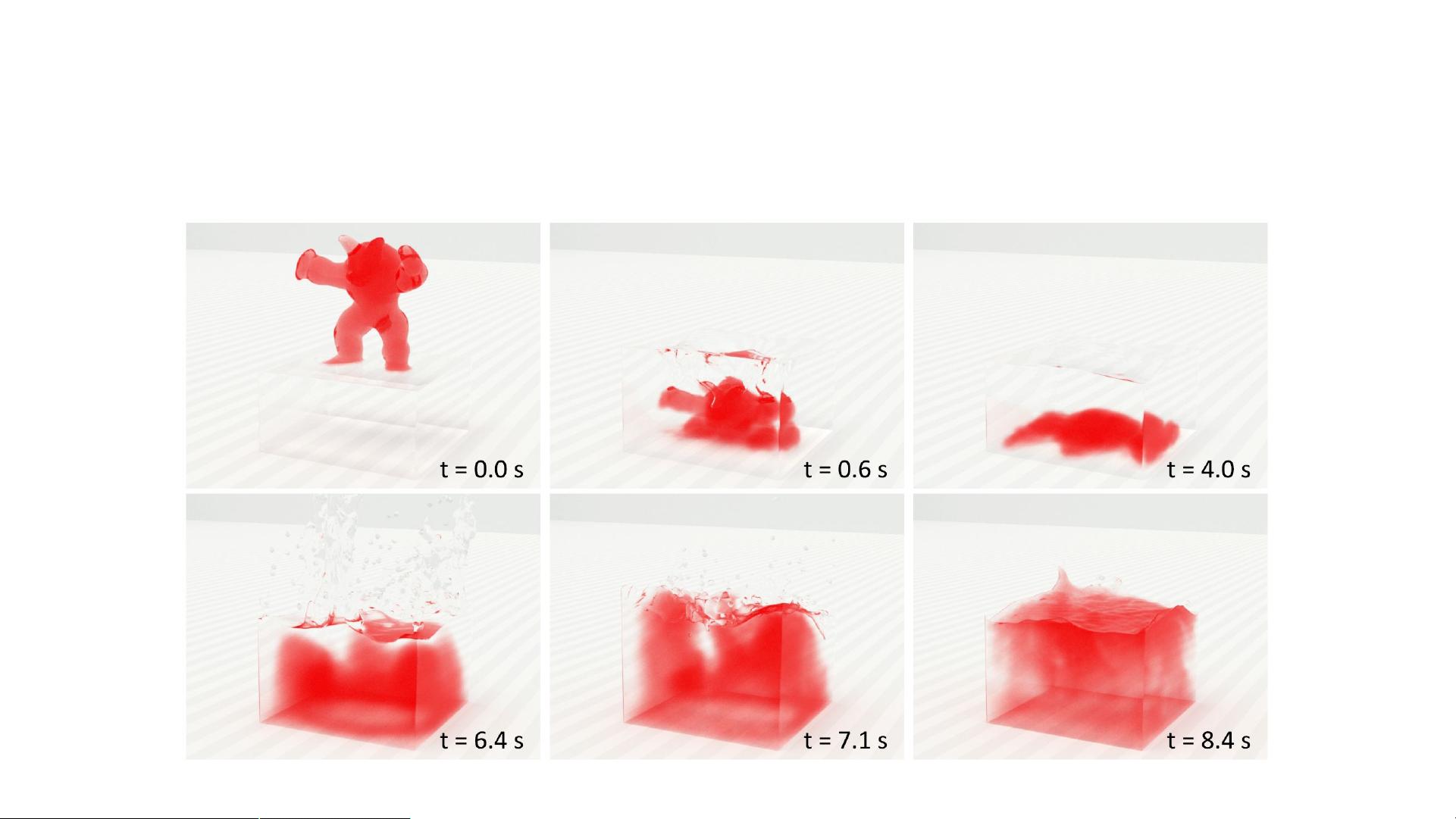
**SPH算法**(Smoothed Particle Hydrodynamics)是一种基于粒子的数值方法,最初应用于天体物理学领域,如模拟星系形成、恒星演化等。随着时间的发展,SPH算法的应用范围不断扩大,包括计算固体力学、计算流体力学以及原子尺度问题的模拟等领域。
#### 二、SPH算法的基本原理
SPH算法的核心思想是将连续的物理场用离散的粒子表示,并通过近似方法来求解物理场中的各种属性。具体而言,SPH算法包含以下几个关键步骤:
1. **将连续的物体用离散的粒子表示**
- 将研究对象分解成一系列独立的粒子,每个粒子代表一定的物理属性,如质量、速度等。
- 这一步骤使得原本连续的问题转化为一系列离散粒子之间的交互问题。
2. **将某一点的物理属性转化为影响域内的粒子对该粒子的影响**
- 每个粒子不仅拥有自己的物理属性,还受到其邻域内其他粒子的影响。
- 通过核函数(Nuclear Function)来衡量每个粒子对其他粒子的影响程度。
#### 三、实现SPH算法的关键步骤
1. **函数核近似**
- 函数核近似是SPH算法的基础,其目的是将连续的空间转化为离散的粒子表示。
- 具体而言,空间中的任一属性(如速度、密度等)都可用核函数表示,进而通过积分转换为离散形式。
- 核函数需要满足以下条件:
- 正则化条件:确保函数在整个空间的积分值为1。
- 当光滑长度趋于零时具有狄拉克函数性质:这保证了在无限小的区域内,核函数的行为与狄拉克δ函数相似。
- 紧支性条件:仅在其定义域内非零,这意味着影响仅限于一定范围内。
- 偶函数性质:确保函数关于原点对称。
2. **粒子近似**
- 在实际计算过程中,需要将连续的空间属性转化为离散的粒子表示。
- 这一步骤通常涉及到如何计算粒子间的相互作用力,包括压力、粘度力和重力等。
- 计算粒子运动时,需要考虑其初始状态(如初始位置、初速度等)、合外力(包括压力、粘度力和重力等)以及密度等参数。
3. **计算密度、压力和粘度力**
- 密度可通过积分公式计算得到,其中核函数用于衡量不同粒子间的影响程度。
- 压力通常根据理想气体状态方程进行简化计算。
- 粘度力由粒子间的相对速度差引起,其大小与流体的粘度系数以及速度差有关。
4. **计算粒子的运动状态**
- 根据牛顿第二定律,可以计算出粒子的加速度,进而得出其速度和位置的变化。
- 通过迭代计算,可以逐步更新粒子的位置和速度,从而模拟出流体或固体的动态行为。
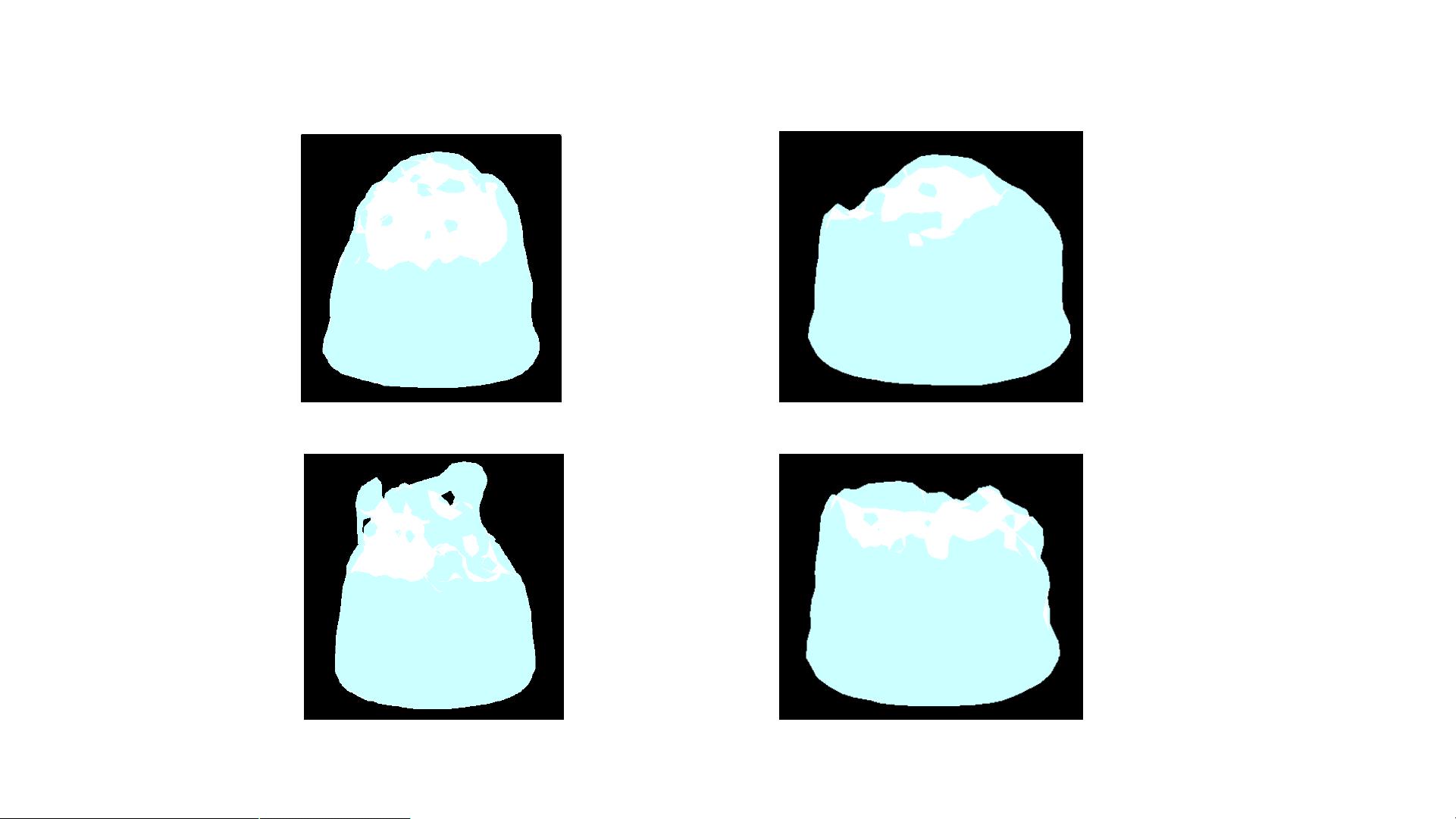
#### 四、渲染阶段:MARCHING CUBES算法
1. **MARCHING CUBES算法简介**
- MARCHING CUBES算法是一种用于从三维标量场数据中提取等值面的算法。
- 该算法通过在三维空间中构建一系列小立方体,并判断每个立方体的顶点是否位于等值面上,以此来确定等值面的形状。
- 通过这种分治的方法,可以高效地重建出复杂三维模型的表面结构。
2. **MARCHING CUBES算法的具体步骤**
- 准备四个切面,并从中选择相邻的四个顶点构建一个立方体。
- 比较立方体八个顶点的值与等值面的值,确定哪些顶点位于等值面内部或外部。
- 使用查表方法确定立方体与等值面相交的情况,并计算出相应的交点位置。
- 插值这些交点位置,并连接它们以构成等值面。
#### 结语
SPH算法作为一种灵活且强大的数值模拟工具,已经在多个领域展现出广泛的应用前景。通过上述介绍可以看出,SPH算法的核心在于如何有效地将连续问题转化为离散粒子表示,并利用核函数和粒子近似等技术来解决复杂物理现象的模拟问题。此外,MARCHING CUBES算法作为渲染阶段的重要组成部分,能够帮助我们直观地呈现模拟结果,使复杂的数据可视化成为可能。