伺服电机编码器与转子磁极相位对齐方法.pdf
版权申诉
67 浏览量
2024-04-18
00:40:44
上传
评论
收藏 299KB PDF 举报

伺服电机编码器与转子磁极相位对齐方法
永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐
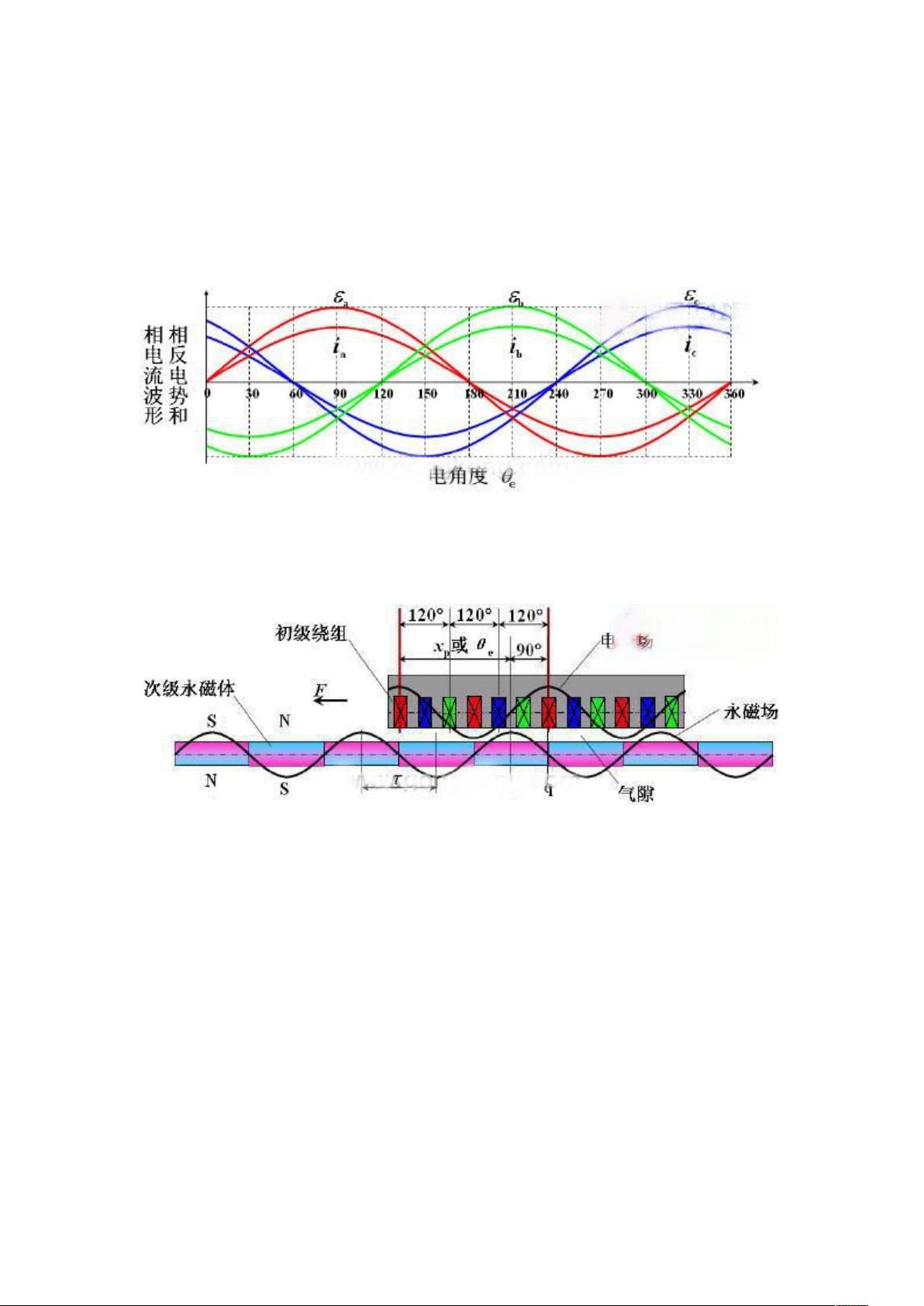
其唯一目的就是要达成矢量控制的目标,使 d 轴励磁分量和 q 轴出力分量解耦,令永磁交流
伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而获得最佳的出力效果,即“类
直流特性”,这种控制方法也被称为磁场定向控制(FOC),达成 FOC 控制目标的外在表现
就是永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,如下图所示:
图 1
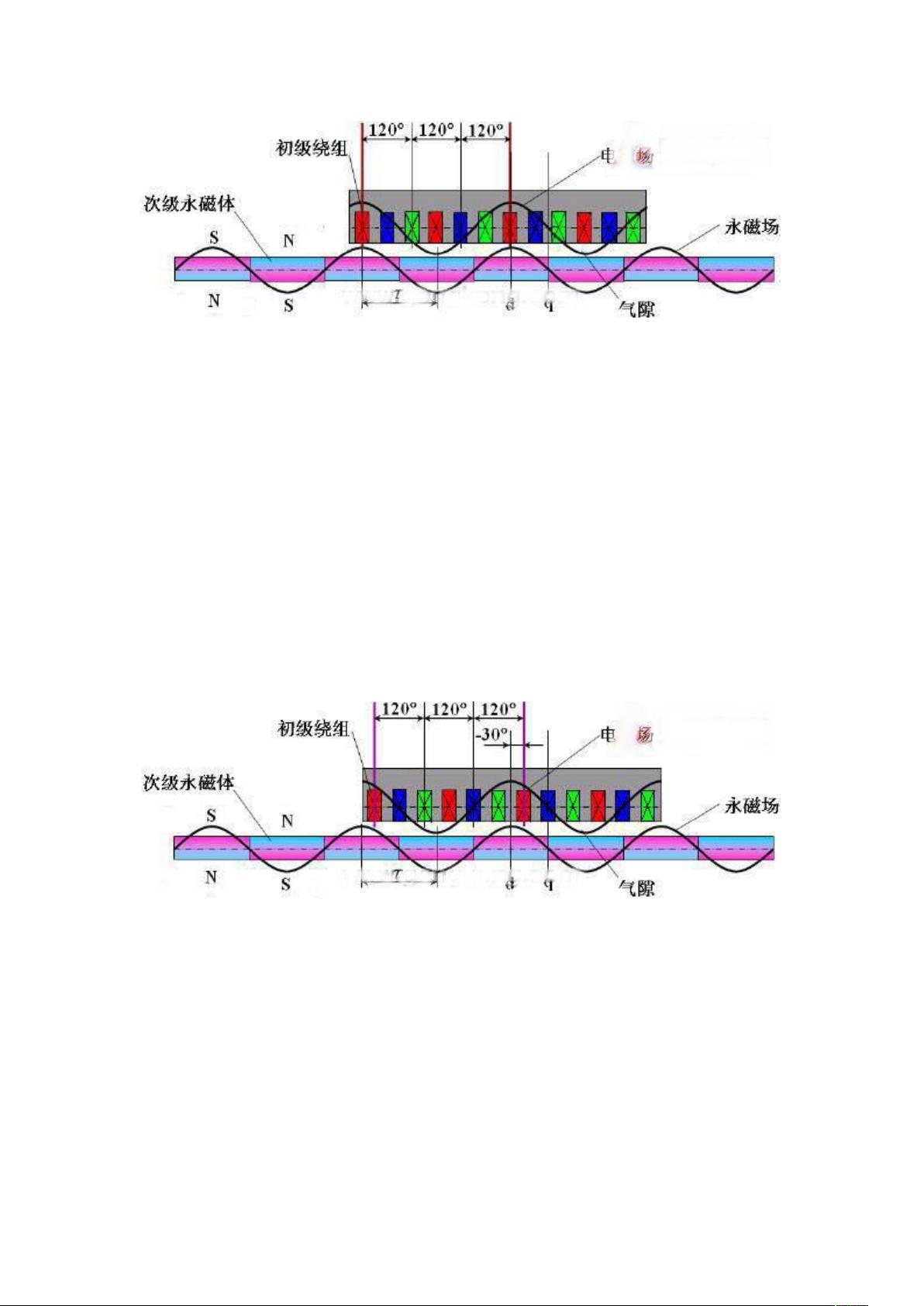
因此反推可知,只要想办法令永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持
一致,就可以达成 FOC 控制目标,使永磁交流伺服电机的初级电磁场与磁极永磁场正交,
即波形间互差 90 度电角度,如下图所示:
图 2
如何想办法使永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致呢?由图 1
可知,只要能够随时检测到正弦型反电势波形的电角度相位,然后就可以相对容易地根据电
角度相位生成与反电势波形一致的正弦型相电流波形了。
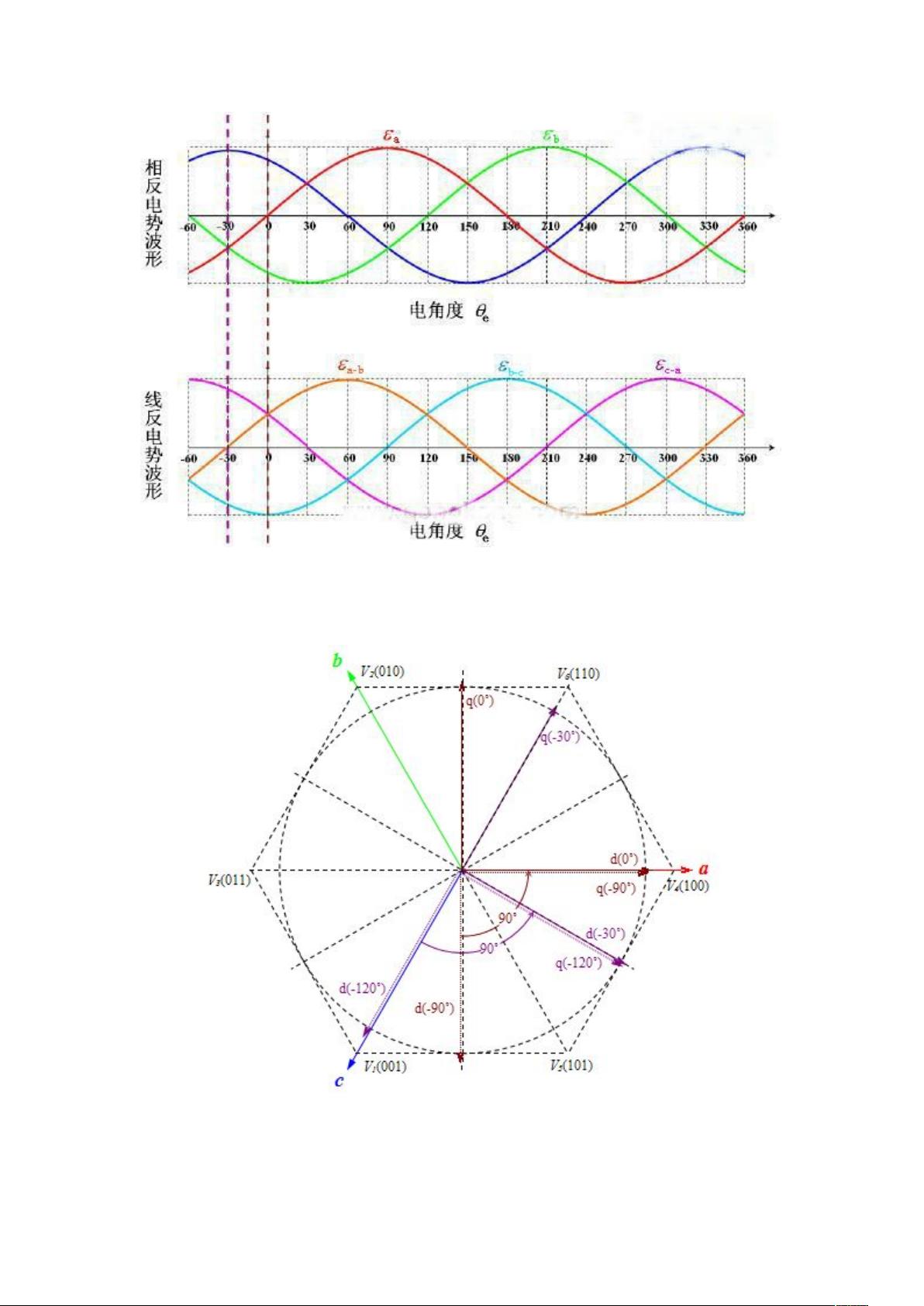
在此需要明示的是,永磁交流伺服电机的所谓电角度就是 a 相(U 相)相反电势波形的正弦
(Sin)相位,因此相位对齐就可以转化为编码器相位与反电势波形相位的对齐关系;另一
方面,电角度也是转子坐标系的 d 轴(直轴)与定子坐标系的 a 轴(U 轴)或α轴之间的夹
角,这一点有助于图形化分析。
在实际操作中,欧美厂商习惯于采用给电机的绕组通以小于额定电流的直流电流使电机转子
定向的方法来对齐编码器和转子磁极的相位。当电机的绕组通入小于额定电流的直流电流
时,在无外力条件下,初级电磁场与磁极永磁场相互作用,会相互吸引并定位至互差 0 度相
位的平衡位置上,如下图所示:
剩余12页未读,继续阅读
资源评论


心梓知识
- 粉丝: 5546
- 资源: 3万+









最新资源
- 筷手引流工具.apk
- 论文(最终)_20240430235101.pdf
- 基于python编写的Keras深度学习框架开发,利用卷积神经网络CNN,快速识别图片并进行分类
- 最全空间计量实证方法(空间杜宾模型和检验以及结果解释文档).txt
- 5uonly.apk
- 蓝桥杯Python组的历年真题
- 2023-04-06-项目笔记 - 第一百十九阶段 - 4.4.2.117全局变量的作用域-117 -2024.04.30
- 2023-04-06-项目笔记 - 第一百十九阶段 - 4.4.2.117全局变量的作用域-117 -2024.04.30
- 前端开发技术实验报告:内含4四实验&实验报告
- Highlight Plus v20.0.1
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


