

Baidu Apollo EM Motion Planner
Haoyang Fan
1,†
, Fan Zhu
2,†
, Changchun Liu, Liangliang Zhang, Li Zhuang,
Dong Li, Weicheng Zhu, Jiangtao Hu, Hongye Li, Qi Kong
3,∗
Abstract— In this manuscript, we introduce a real-
time motion planning system based on the Baidu
Apollo (open source) autonomous driving platform.
The developed system aims to address the industrial
level-4 motion planning problem while considering
safety, comfort and scalability. The system covers
multilane and single-lane autonomous driving in a
hierarchical manner: (1) The top layer of the system
is a multilane strategy that handles lane-change sce-
narios by comparing lane-level trajectories computed
in parallel. (2) Inside the lane-level trajectory gener-
ator, it iteratively solves path and speed optimization
based on a Frenet frame. (3) For path and speed
optimization, a combination of dynamic programming
and spline-based quadratic programming is proposed
to construct a scalable and easy-to-tune framework
to handle traffic rules, obstacle decisions and smooth-
ness simultaneously. The planner is scalable to both
highway and lower-speed city driving scenarios. We
also demonstrate the algorithm through scenario
illustrations and on-road test results.
The system described in this manuscript has been
deployed to dozens of Baidu Apollo autonomous
driving vehicles since Apollo v1.5 was announced in
September 2017. As of May 16th, 2018, the system
has been tested under 3,380 hours and approximately
68,000 kilometers (42,253 miles) of closed-loop au-
tonomous driving under various urban scenarios.
The algorithm described in this manuscript
is available at https://github.com/
ApolloAuto/apollo/tree/master/modules/
planning.
I. INTRODUCTION
Autonomous driving research began in the 1980s
and has significantly grown over the past ten years.
Autonomous driving aims to reduce road fatalities,
†
Authors who contributed equally in this manuscript
∗
Corresponding author for this manuscript
#
www.apollo.auto
1
Haoyang Fan is with Baidu USA LLC,
fanhaoyang01@baidu.com.
2
Fan Zhu is with Baidu USA LLC, fanzhu@baidu.com.
3
Qi Kong is with Baidu USA LLC, kongqi02@baidu.com.
increase traffic efficiency and provide convenient
travel. However, autonomous driving is a chal-
lenging task that requires accurately sensing the
environment, a deep understanding of vehicle inten-
tions and safe driving under different scenarios. To
address these difficulties, we constructed an Apollo
open source autonomous driving platform. The
flexible modularized architecture of the developed
platform supports fully autonomous driving deploy-
ment https://github.com/ApolloAuto/
apollo.
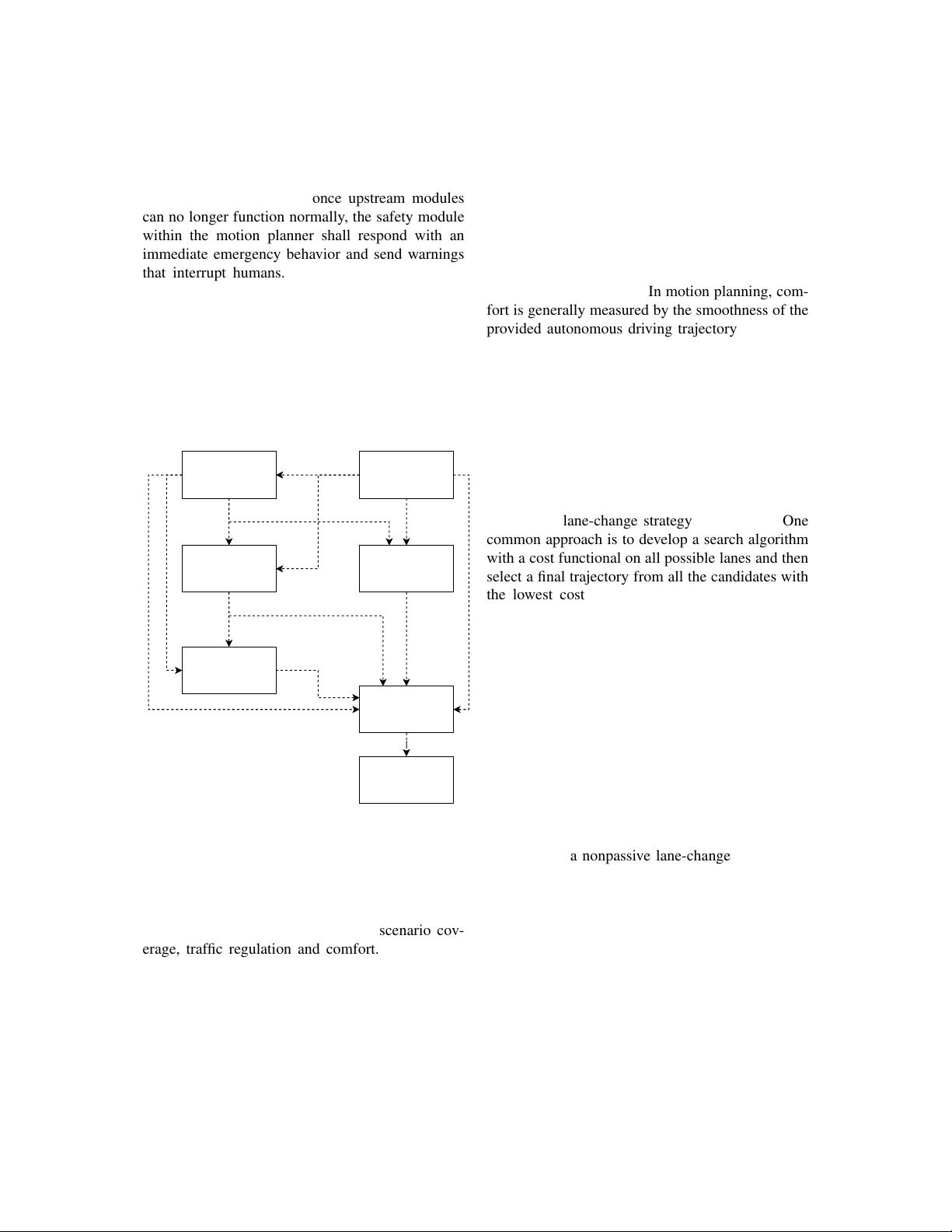
In the figure, the HD map module provides a
high-definition map that can be accessed by every
on-line module. Perception and localization mod-
ules provide the necessary dynamic environment
information, which can be further used to predict
future environment status in the prediction module.
The motion planning module considers all infor-
mation to generate a safe and smooth trajectory to
feed into the vehicle control module.
In motion planner, safety is always the top pri-
ority. We consider autonomous driving safety in,
but not limited to, the following aspects: traffic
regulations, range coverage, cycle time efficiency
and emergency safety. All these aspects are critical.
Traffic regulations are designed by governments for
public transportation safety, and such regulations
also apply to autonomous driving vehicles. An
autonomous driving vehicle should follow traffic
regulations at all times. For range coverage, we aim
to provide a trajectory with at least an eight second
or two hundred meter motion planning trajectory.
The reason is to leave enough room to maintain safe
driving within regular autonomous driving vehicle
dynamics. The execution time of the motion plan-
ning algorithm is also important. In the case of an
emergency, the system could react within 100 ms,
compared with a 300 ms reaction time for a normal
arXiv:1807.08048v1 [cs.RO] 20 Jul 2018

剩余14页未读,继续阅读
资源评论


qq_32364337
- 粉丝: 0
- 资源: 2









最新资源
- 音乐网站(JSP+SERVLET).rar
- 抢购软件:快速复制信息
- oracle错误代码和信息速查手册chm版最新版本
- MATLAB【逆变器二次调频模型】 微电网分布式电源逆变器DROOP控制二次调频模型,加入二次控制实现二次调频控制,及二次调压控制,程序可实现上图功能,工况有所改变 需要matlab2021A版
- 基于python的网页自动化工具项目全套技术资料100%好用.zip
- Oracle数据库命令速查手册doc版最新版本
- 程序名称:转向设计计算程序 开发平台:基于matlab平台 计算内容:阿克曼转角,转弯半径,转向阻力矩,回正力矩,转向主参数,转向传动比,力矩波动,转向梯形,EPS匹配,HPS匹配,齿轮齿条传动比,循
- 基于二阶自抗扰ADRC的轨迹跟踪控制,对车辆的不确定性和外界干扰具有一定抗干扰性,基于carsim和simulink仿真 跟踪轨迹为双移线,效果良好,有对应复现资料,是学习自抗扰技术快速入门很好的资料
- TianleSoftwareOracle学习手册中文pdf格式最新版本
- MATLAB代码:基于分布式ADMM算法的考虑碳排放交易的电力系统优化调度研究 关键词:分布式调度 ADMM算法 交替方向乘子法 碳排放 最优潮流 仿真平台:MATLAB+CPLEX GUROBI
- Oracle安装配置使用WORD文档doc格式最新版本
- 西门子840D HMI ADVANCED FOR PC 也可用于810D,840DSL中文版 1、软件可安装到台式机或笔记本上,可以连接到机床的NCU进行NC与PLC的数据备份与恢复,备份和恢复的数
- OraclePLSQL简单安装指南WORD文档doc格式最新版本
- 网页数据采集软件项目全套技术资料100%好用.zip
- Oracle高级SQL培训与讲解WORD文档doc格式最新版本
- 超智能体写的人工智能深度学习pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


