
Encoding Sentences with Graph Convolutional Networks
for Semantic Role Labeling
Diego Marcheggiani
1
Ivan Titov
1,2
1
ILLC, University of Amsterdam
2
ILCC, School of Informatics, University of Edinburgh
marcheggiani@uva.nl ititov@inf.ed.ac.uk
Abstract
Semantic role labeling (SRL) is the task of
identifying the predicate-argument struc-
ture of a sentence. It is typically re-
garded as an important step in the stan-
dard NLP pipeline. As the semantic rep-
resentations are closely related to syntac-
tic ones, we exploit syntactic information
in our model. We propose a version of
graph convolutional networks (GCNs), a
recent class of neural networks operating
on graphs, suited to model syntactic de-
pendency graphs. GCNs over syntactic de-
pendency trees are used as sentence en-
coders, producing latent feature represen-
tations of words in a sentence. We ob-
serve that GCN layers are complementary
to LSTM ones: when we stack both GCN
and LSTM layers, we obtain a substantial
improvement over an already state-of-the-
art LSTM SRL model, resulting in the best
reported scores on the standard benchmark
(CoNLL-2009) both for Chinese and En-
glish.
1 Introduction
Semantic role labeling (SRL) (Gildea and Juraf-
sky, 2002) can be informally described as the task
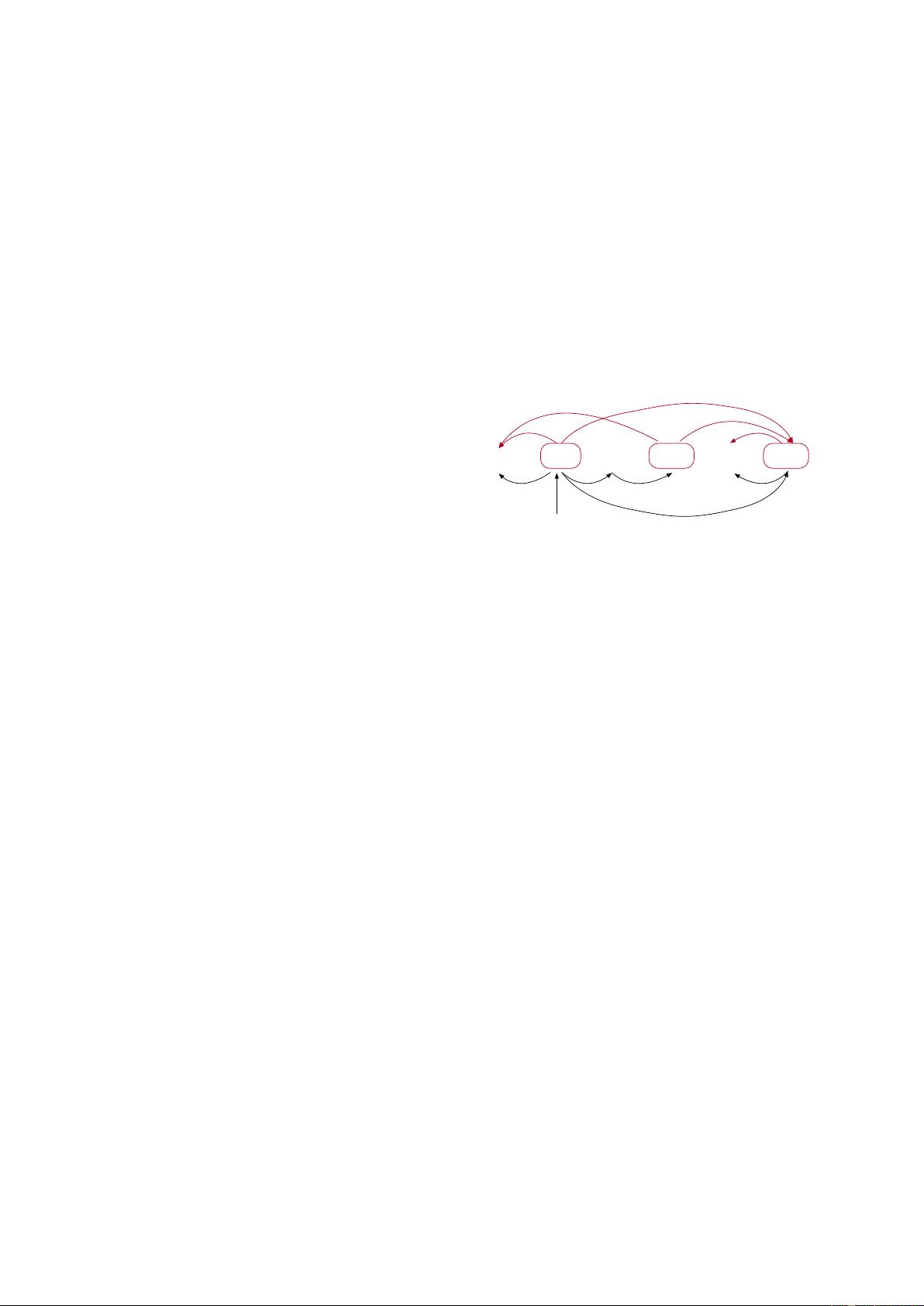
of discovering who did what to whom. For ex-
ample, consider an SRL dependency graph shown
above the sentence in Figure 1. Formally, the task
includes (1) detection of predicates (e.g., makes);
(2) labeling the predicates with a sense from a
sense inventory (e.g., make.01); (3) identifying
and assigning arguments to semantic roles (e.g.,
Sequa is A0, i.e., an agent / ‘doer’ for the corre-
sponding predicate, and engines is A1, i.e., a pa-
tient / ‘an affected entity’). SRL is often regarded
Sequa makes and repairs jet engines.
SBJ
COORD
OBJ
CONJ NMOD
ROOT
A1
A1
A1
A0
A0
make.01
repair.01 engine.01
Figure 1: An example sentence annotated with se-
mantic (top) and syntactic dependencies (bottom).
as an important step in the standard NLP pipeline,
providing information to downstream tasks such
as information extraction and question answering.
The semantic representations are closely re-
lated to syntactic ones, even though the syntax-
semantics interface is far from trivial (Levin,
1993). For example, one can observe that many
arcs in the syntactic dependency graph (shown in
black below the sentence in Figure 1) are mir-
rored in the semantic dependency graph. Given
these similarities and also because of availability
of accurate syntactic parsers for many languages,
it seems natural to exploit syntactic information
when predicting semantics. Though historically
most SRL approaches did rely on syntax (Thomp-
son et al., 2003; Pradhan et al., 2005; Punyakanok
et al., 2008; Johansson and Nugues, 2008), the last
generation of SRL models put syntax aside in fa-
vor of neural sequence models, namely LSTMs
(Zhou and Xu, 2015; Marcheggiani et al., 2017),
and outperformed syntactically-driven methods on
standard benchmarks. We believe that one of the
reasons for this radical choice is the lack of sim-
ple and effective methods for incorporating syn-
tactic information into sequential neural networks
(namely, at the level of words). In this paper we
arXiv:1703.04826v4 [cs.CL] 30 Jul 2017

剩余10页未读,继续阅读
资源评论


樱夕夕
- 粉丝: 45
- 资源: 3









最新资源
- (源码)基于Spring Boot的极简易课堂对话系统.zip
- (源码)基于JSP+Servlet+MySQL的学生管理系统.zip
- (源码)基于ESP8266的蜂箱监测系统.zip
- (源码)基于Spring MVC和Hibernate框架的学校管理系统.zip
- (源码)基于TensorFlow 2.3的高光谱水果糖度分析系统.zip
- (源码)基于Python框架库的知识库管理系统.zip
- (源码)基于C++的日志管理系统.zip
- (源码)基于Arduino和OpenFrameworks的植物音乐感应系统.zip
- (源码)基于Spring Boot和Spring Security的博客管理系统.zip
- (源码)基于ODBC和C语言的数据库管理系统.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


