Key words
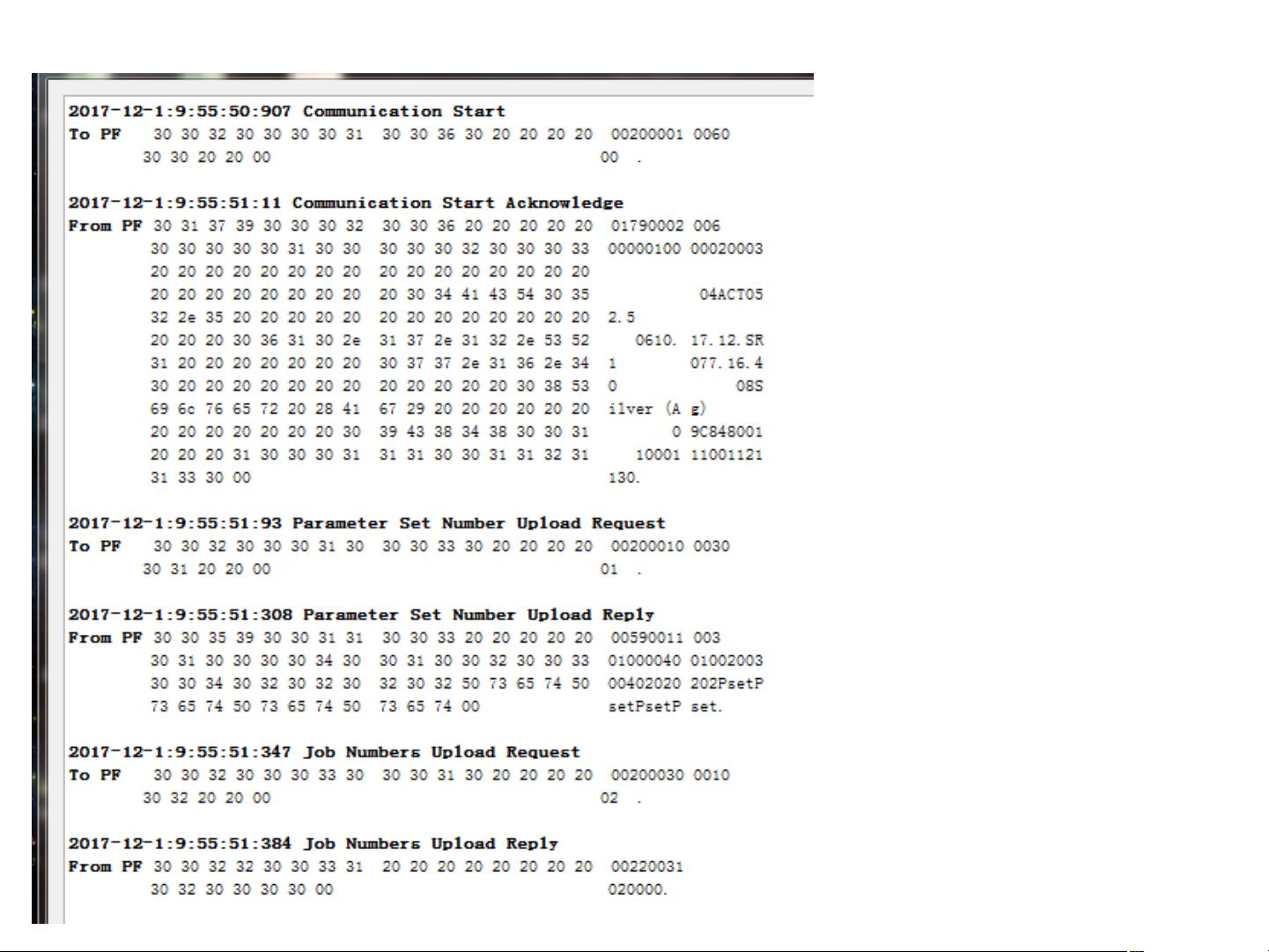
• 开放协议测试软件作为我们配合集
成商测试协议报文代码有非常大的
帮助。
• 我们能做的只是测试出关键信息给
到客户。回复的内容信息需要客户
的软件工程师翻阅开放协议或者直
接从回复内容中读取与了解。
• 网口协议更便捷(TCP协议)
• 串口RS232,需添加串口前后缀,
且需使用交叉线
1-4字节
字符总长
5-8字节
MID信息内容
9-11字节
版本号
20填满字符总长;00结束
其他数据与结束

 Atlas拧紧示例.rar (29个子文件)
Atlas拧紧示例.rar (29个子文件)  Atlas拧紧示例 .vs Atlas v14
Atlas拧紧示例 .vs Atlas v14  .suo 45KB Atlas.sln 905B Atlas bin Release Debug
.suo 45KB Atlas.sln 905B Atlas bin Release Debug  Atlas.vshost.exe 22KB Atlas.pdb 160KB Atlas.exe 115KB Atlas.vshost.exe.manifest 490B Form1.Designer.cs 10KB Program.cs 486B obj Debug Atlas.pdb 160KB Atlas.Form1.resources 180B Atlas.Properties.Resources.resources 180B
Atlas.vshost.exe 22KB Atlas.pdb 160KB Atlas.exe 115KB Atlas.vshost.exe.manifest 490B Form1.Designer.cs 10KB Program.cs 486B obj Debug Atlas.pdb 160KB Atlas.Form1.resources 180B Atlas.Properties.Resources.resources 180B Atlas.csproj.FileListAbsolute.txt 1KB DesignTimeResolveAssemblyReferencesInput.cache 7KB DesignTimeResolveAssemblyReferences.cache 864B Atlas.csprojResolveAssemblyReference.cache 2KB TempPE Atlas.exe 115KB Atlas.csproj.GenerateResource.Cache 1013B Atlas.csproj 7KB Form1.cs 13KB Form1.resx 7KB Properties Resources.resx 5KB Settings.settings 249B AssemblyInfo.cs 1KB Settings.Designer.cs 1KB Resources.Designer.cs 3KB OpenProtocolInterface.dll 160KB 拧紧枪协议.txt 1KB
Atlas.csproj.FileListAbsolute.txt 1KB DesignTimeResolveAssemblyReferencesInput.cache 7KB DesignTimeResolveAssemblyReferences.cache 864B Atlas.csprojResolveAssemblyReference.cache 2KB TempPE Atlas.exe 115KB Atlas.csproj.GenerateResource.Cache 1013B Atlas.csproj 7KB Form1.cs 13KB Form1.resx 7KB Properties Resources.resx 5KB Settings.settings 249B AssemblyInfo.cs 1KB Settings.Designer.cs 1KB Resources.Designer.cs 3KB OpenProtocolInterface.dll 160KB 拧紧枪协议.txt 1KB Atals开放协议.pptx 1.12MB Atlas.v11.suo 29KB
Atals开放协议.pptx 1.12MB Atlas.v11.suo 29KB













评论1