

已知技术参数和设计要求:
扩展一块 键盘显示器采用 串行输入输出共阴极六位数码管
设计步进电机驱动电路
控制系统能够实现
()用键盘输入步进电机正、反转的转速或正、反转的角度,控制步进电
机的启动、运行和停止。
()显示器显示步进电机的给定正、反转的转速或角度。
()控制步进电机按给定转速或角度旋转
一.MAX72 1 9 原理及其应用
是微处理器和共阴极七段— — 八位显示、图条/柱图显示
或点阵显示接口的小型串行输入/输出芯片。片内包括译码器、多路
扫描控制器、字和位驱动器和静态。外部只需要一个电阻设置所有
显示器字段电流。和微处理器只需三根导线连接,每位显示
数字有一个地址由微处理器写入。允许使用者选择每位是译码或不译码。
使用者还可选择停机模式、数字亮度控制、从~选择扫描位数
和对所有显示器的测试模式。
1. MAX7219工作原理
1.1 MAX7219简介
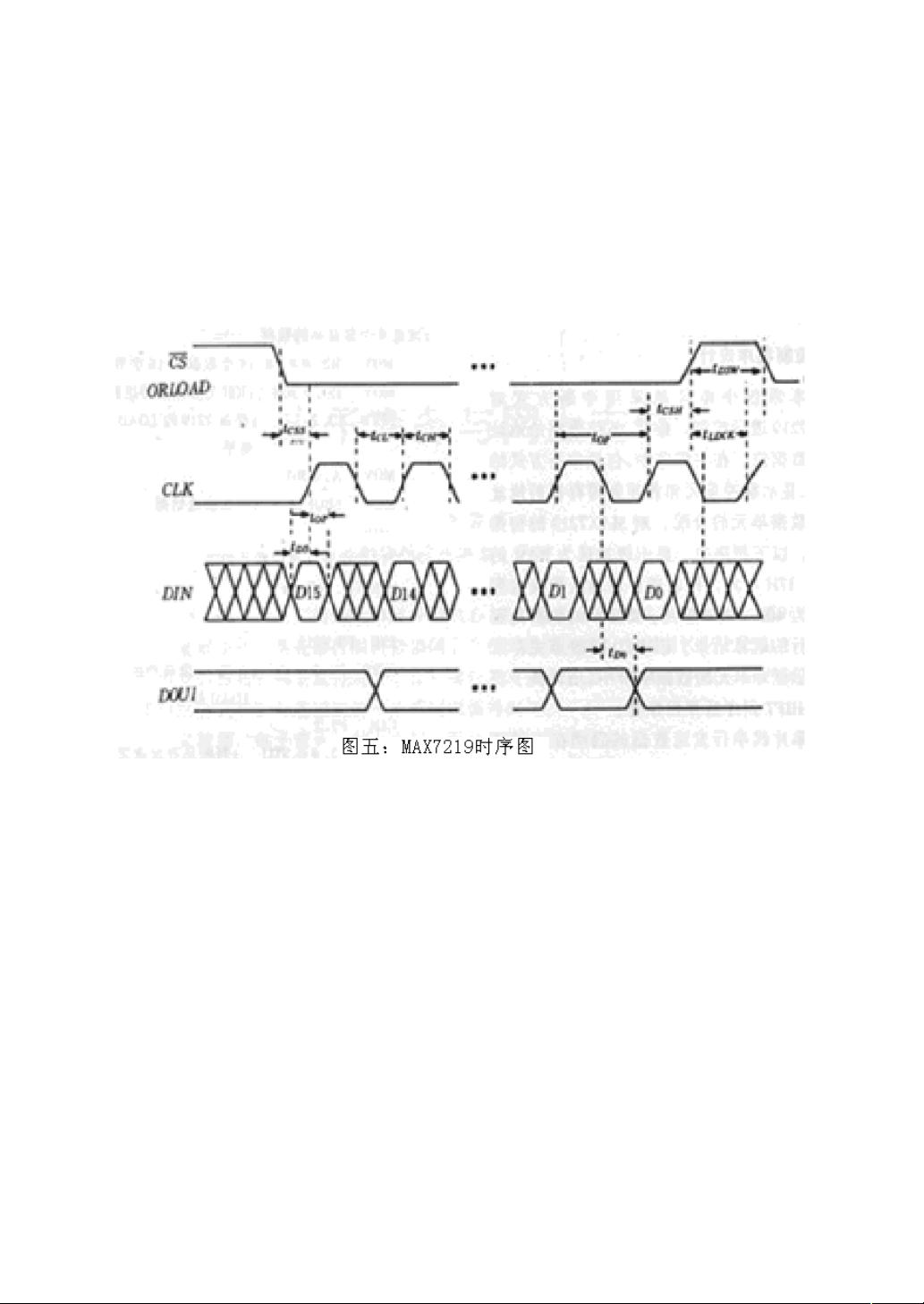
和单片计算机连接有三条引线、、,采用位数
据串行移位接收方式。即单片机将位二进制数逐位发送到端。在
上升沿到来前准备就绪,的每个上升沿将一位数据移入内移
位寄存器, 当位数据移入完,在引脚信号上升沿将位数据装入
内的相应位置,在内部硬件动态扫描显示控制电路作
用下实现动态显示。
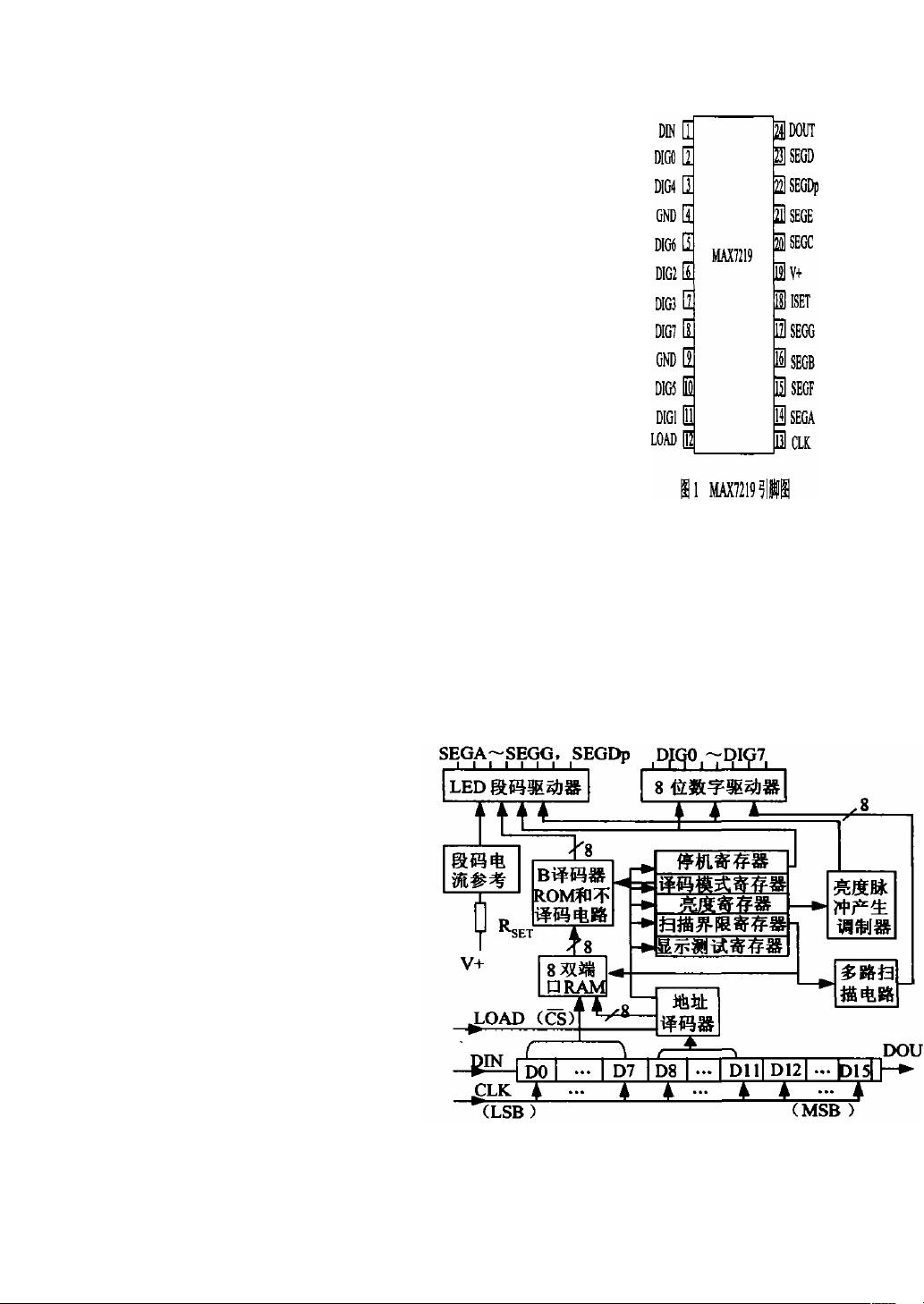
1.2MAX7219引脚说明


剩余27页未读,继续阅读
资源评论


五月天007
- 粉丝: 11
- 资源: 8









最新资源
- 职工上、下班交通费补贴规定.docx
- 房地产公司圣诞活动策划方案.docx
- 全球旅游与经济指标数据集,旅游影响因素数据集,旅游与收入数据(六千六百多条数据)
- 公司下午茶费用预算.xlsx
- 下午茶.docx
- 毕设和企业适用springboot计算机视觉平台类及在线平台源码+论文+视频.zip
- 2014年度体检项目.xls
- 年度员工体检项目.xls
- 年度体检.xlsx
- 毕设和企业适用springboot跨境电商平台类及虚拟现实体验平台源码+论文+视频.zip
- 毕设和企业适用springboot平台对接类及全球电商管理平台源码+论文+视频.zip
- 数据库-sqlite客户端-sqlite-访问sqlite数据库
- 住宅小区汽车超速检测及报警系统设计(单片机源码+图+报告)
- 毕设和企业适用springboot区块链技术类及客户关系管理平台源码+论文+视频.zip
- 毕设和企业适用springboot区块链技术类及音频处理平台源码+论文+视频.zip
- 毕设和企业适用springboot区块链交易平台类及交通信息平台源码+论文+视频.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


