

WER 能力挑战赛——“万物互联”竞赛规则
1 主题简介
本届竞赛的主题为:“万物互联”。
随着科学技术的发展,5G 时代已经到来。5G 的超强带宽、极低延时具有极强的信息冲击力和广
阔的应用场景。远程控制、自动驾驶、智能家居、智慧城市等等以前在科幻电影中的场景将逐步变成
现实。5G 的广泛应用给人们的想象力和实现力插上了腾飞的翅膀,让人们的生活和工作变得十分高
效和便捷。
未来,琳琅满目的产品都将有微处理器,并通过 5G 网络连接在一起。那时,电视、空调等家用
电器也许只需要通过语音甚至脑电波就可以轻松实现开关或功能的切换。家电产品还很有可能会变得
更加“聪明”,它们能够了解家庭中每个成员的性格、爱好和操作习惯,通过智能识别来自主与使用
者匹配,省去了反复调试产品的环节,十分人性化和智能化。
当然,科技的发展也不会总是一帆风顺的,在“万物互联”的时代,我们也要面临个人隐私、信
息安全等各种问题。如何正确并积极解决这些问题,需要我们开动脑筋,群策群力,寻找出破解难题
的办法。
在本届竞赛中,参赛队员要扮演工程师的角色,开动脑筋,利用新结构、新技术来创造自己的机
器人以完成各项竞赛任务,也要积极思考未来信息时代可能带来的弊端,以及如何预防这些弊端的发
生。
2 竞赛主题
本届教育机器人能力挑战赛的主题为“万物互联”。
3 竞赛场地与环境
3.1 场地
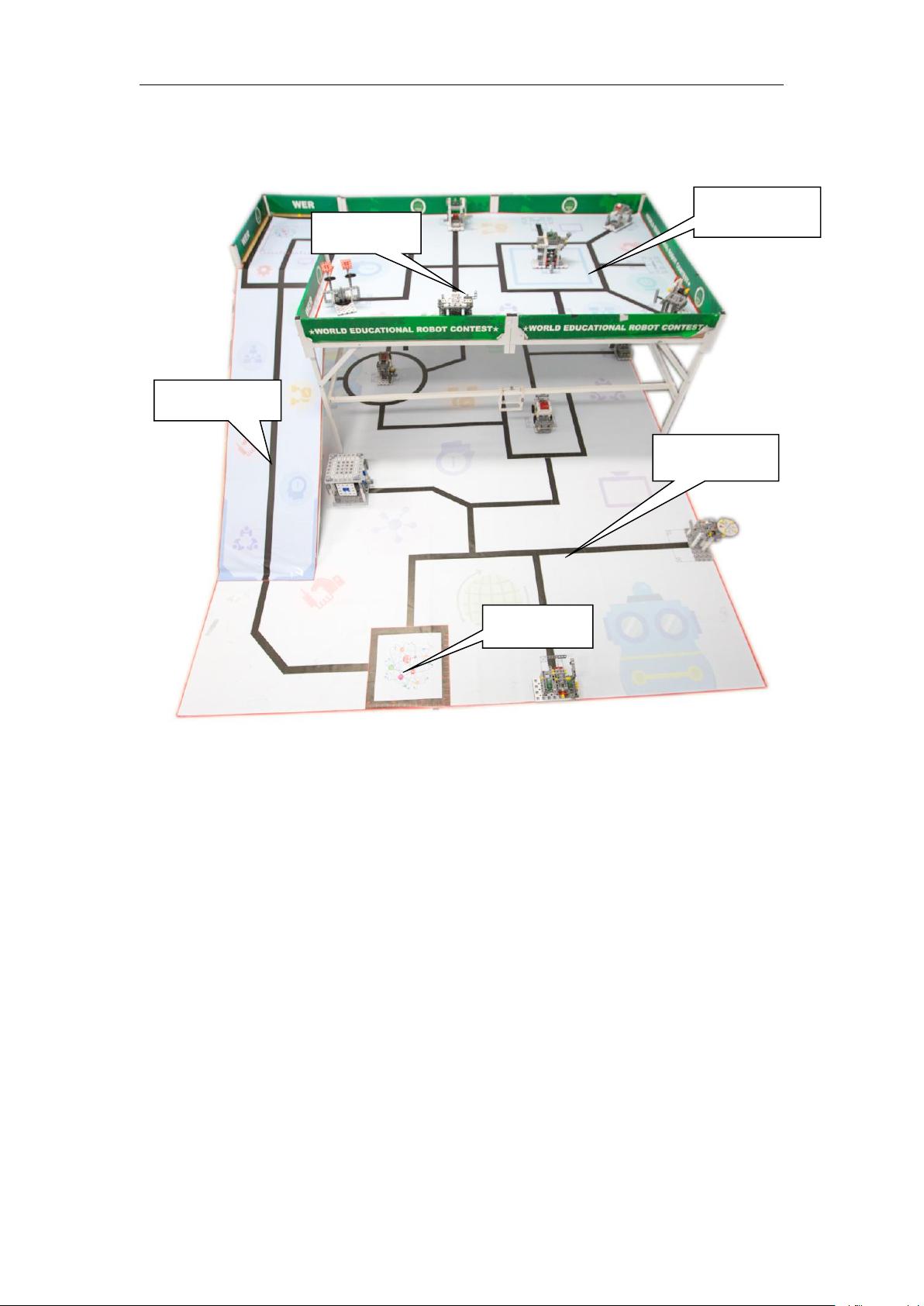
比赛场地分上下两层(如图3-1-1所示),支架为金属材质,两层之间通过斜坡相连,斜坡与一层场地
夹角为30度(±1度),二层场地护栏为木板(高度10cm,厚度1-2cm)。在一层场地、二层场地、斜坡上
各铺有场地膜。
场地上共有2个基地,一层基地大小为30*30cm(长*宽);二层基地位于斜坡顶端黑色横线以上及二
层场地西北角,大小为64*40cm(长*宽)。比赛过程中,机器人可以选择从任一基地离开或返回。



剩余28页未读,继续阅读
资源评论


power2282
- 粉丝: 0
- 资源: 1









最新资源
- 低级胶质瘤(LGG)数据集的目标检测
- 基于SpringBoot+Vue的外卖网上点餐系统.zip
- DirectXDLL文件快速修复工具
- 基于SpringBoot+Mybatis+Mysql技术栈的前后端分离外卖管理系统.zip
- 基于SpringBoot+Mybatis微信小程序软件学院会议室管理系统源码数据库.docx
- 基于模糊pid的双容水箱设计 1.双容水箱液位控制系统 基于模糊PID控制 进行 simulink仿真 pid控制对比实验好,仿...
- 电子科技大学2004年信号与系统考研试题
- 电子科技大学2002年信号与系统考研试题
- MobaXterm 安装包
- java图书管理系统毕业设计(源代码+lw).zip
- 翼支付大数据建模-风险用户识别-季军-代码文件.zip
- 基于javabean+servlet 简单的书籍管理系统.zip
- comsol双温模型半导体 飞秒激光
- 基于jsp+servlet结合layui的图书苏管理系统.zip
- jsp人事工资管理系统(jsp+javabean+servlet+mysql).zip
- 支付宝H5接口文档 (2)1
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


