

CAN 调试总结
—CAN 帧格式波形解析
范泽冰 2012.5.22
一、前言
在调试 LPC2478 的 CAN 的时候,碰到了一些困难,在示
波器上能捕捉到发送出的波形,但是在 PC 机上的 USB-CAN
上位机软件却显示出没有数据接收到,于是乎,对引起故障的
可能原因逐一进行排出,最后发现:这是由于 LPC2478CAN
波形的时序与 USB-CAN 的不一致而引起的(程序中配置不合
理)最终通过查阅《user.manual.lpc24xx》,对芯片的时
钟与波特率进行设定,有效地解决了 CAN 的通信问题。特以
此文,总结此次的调试感受与成果,以便下次能快速解决此类
情况故障。
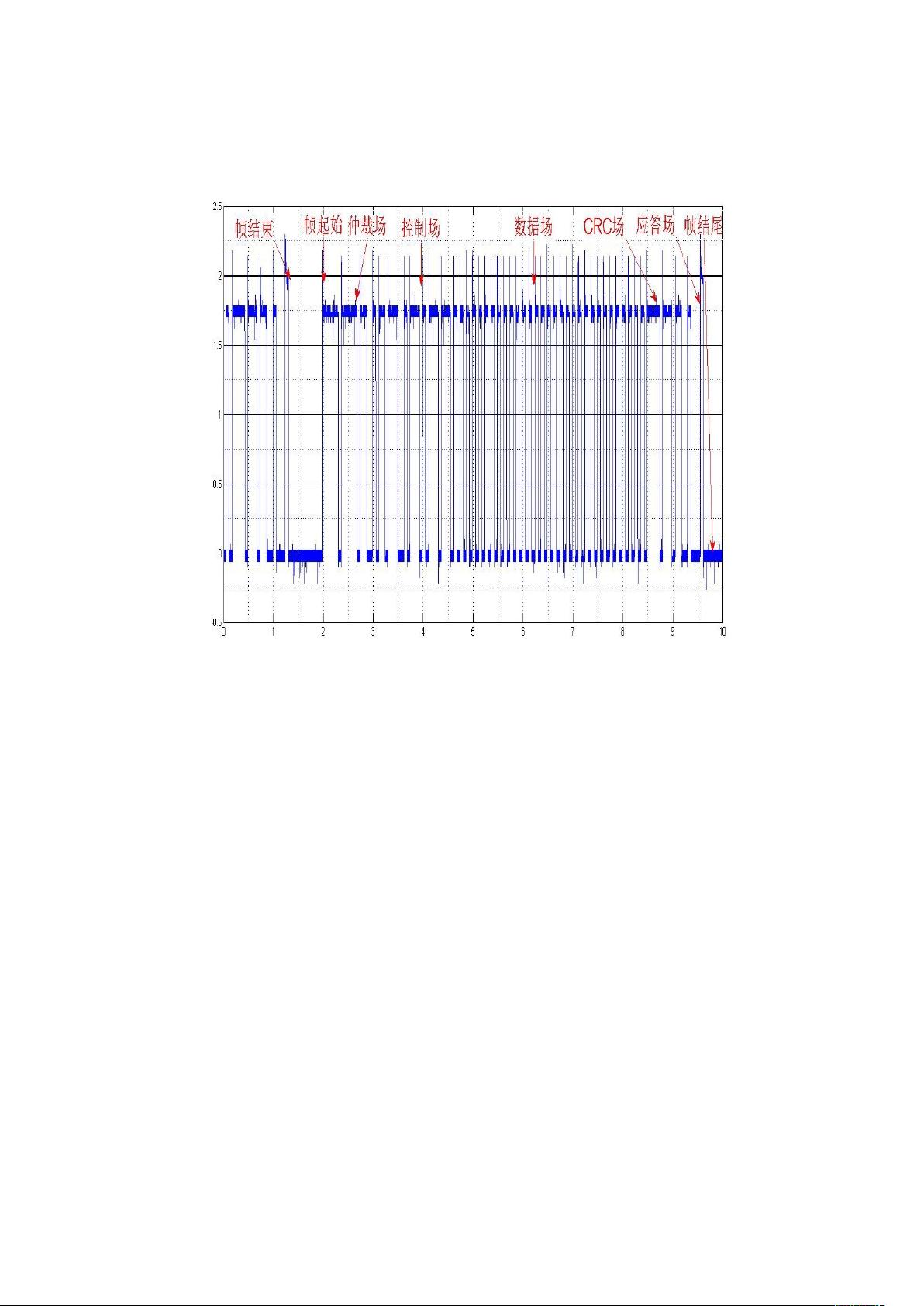
二、CAN 的波形分析
通过示波器截得的 CAN 波形图,我们可以读出其中所有
的数据信息,下面就以我们所截得的波形图为例进行具体分析:
我们已知程序中设定的 CAN 帧类型为扩展数据帧;识别
符(CAN_ID)为 0x00012345;数据长度(DLC)为 8;数
据内容为 0xAAAAAAAAAAAAAAAA。
图 1 为我们用示波器捕捉到的波形图。
剩余10页未读,继续阅读
资源评论













