







An implementation of SIFT detector and descriptor
Andrea Vedaldi
University of California at Los Angeles
Contents
1 Introduction 1
2 User reference: the sift function 1
2.1 Scale space parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.2 Detector parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 Descriptor parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.4 Direct access to SIFT components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
A Internals 4
A.1 Scale spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
A.2 The detector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
A.3 The descriptor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1 Introduction
These notes describe an implementation of the Scale-Invariant Transform Feature (SIFT) detector
and descriptor [1]. The implementation is designed to produce results compatible to Lowe’s version.
1
Designed for the MATLAB environment, it is broken down into several M and MEX files that enable
running only portion of the algorithm.
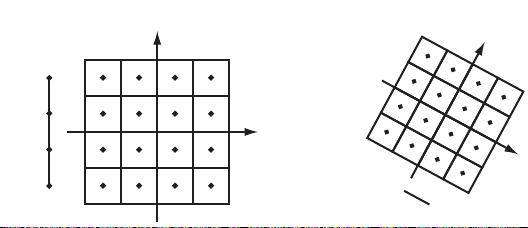
The SIFT detector extracts from an image a collection of frames or keypoints. These are oriented
disks attached to blob-alike structures of the image. As the image translates, rotates and scales, the
frames track these blobs and thus the deformation. By canonization, i.e. by mapping the frames to a
reference (a canonical disk), the effect of such deformation on the feature appearance is removed.
The SIFT descriptor is a coarse description of the edge found in the frame. Due to canonization,
descriptors are invariant to translations, rotations and scalings and are designed to be robust to residual
small distortions.
The SIFT detector and descriptor are discussed in depth in [1]. Here we only describe the interface
to our implementation and, in the Appendix, some technical details.
2 User reference: the sift function
The SIFT detector and the SIFT descriptor are invoked by means of the function sift, which provides
a unified interface to both.
Example 1 (Invocation). The following lines run the SIFT detector and descriptor on the image
data/test.jpg.
1
See http://www.cs.ubc.ca/
~
lowe/keypoints/
1








评论2
最新资源