Understanding the Discrete Element Method.pdf
版权申诉

1
Mechanics
We start with an outline of classical mechanics, to provide a framework for the discrete ele-
ment method (DEM). While most of the material in this chapter can be found scattered in
various books on mechanics, no text seems to be available which covers concisely the con-
cepts needed for DEM simulation. This chapter is intended as a crash course in theoretical
mechanics, with an emphasis on issues relevant to computer implementation and testing. We
give a list of secondary literature that the reader may refer to for further details.
1.1 Degrees of freedom
Before discussing the dynamics of a mechanical system, we need to understand the nature of
the variables in the system. There are independent variables on the one hand, usually called
‘degrees of freedom’, and then there are dependent variables which depend on the degrees of
freedom, via algebraic relations or derivatives.
1.1.1 Particle mechanics and constraints
The concept of a ‘mass point’ means that we neglect the size of the mass and are interested
only in its trajectory. The position of a single mass point moving along the Cartesian x-axis
is described by the value of x, which corresponds to a single degree of freedom. A point
moving in the xy-plane has two degrees of freedom, r
2D
=(x, y), and a point moving in three-
dimensional real space will have three degrees of freedom, r
3D
= (x,y,z).Although we can
describe the motion of a point in three-dimensional space by four ‘space–time coordinates’
using the tuple (x,y,z,t),in classical mechanics t is not considered a degree of freedom but
rather a parameter, i.e. an independent variable which cannot be influenced.
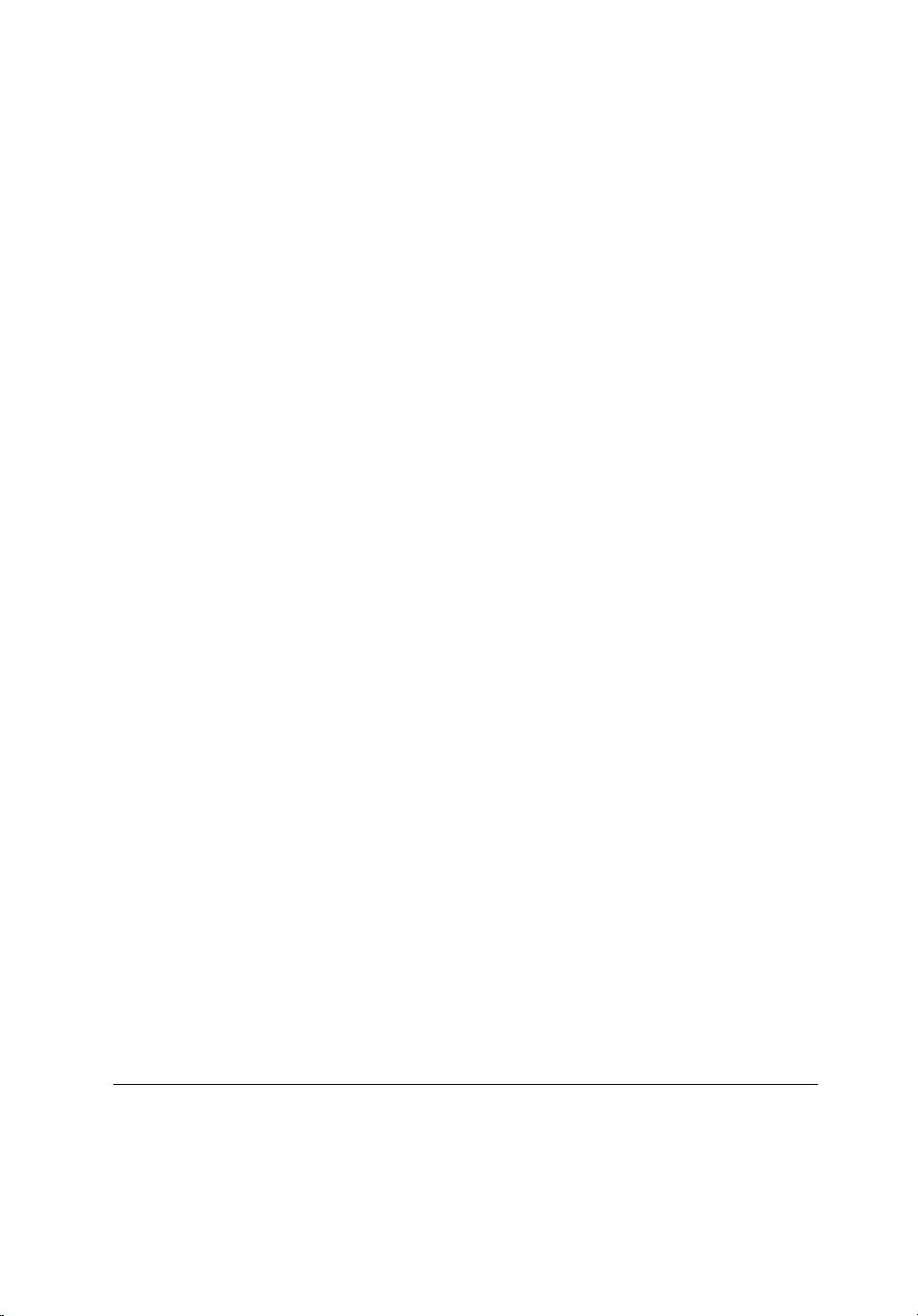
Two mass points moving independently along the x-axis represent two degrees of freedom,
r
1
and r
2
(here and in the following, we assume equal masses). If we ‘glue’ these two particles
together at distance d =r
1
−r
2
as in Figure 1.1, one degree of freedom gets lost, and we are
Understanding the Discrete Element Method: Simulation of Non-Spherical Particles for Granular
and Multi-body Systems, First Edition. Hans-Georg Matuttis and Jian Chen.
© 2014 John Wiley & Sons, Singapore Pte Ltd. Published 2014 by John Wiley & Sons, Singapore Pte Ltd.
Companion website: www.wiley.com/go/matuttis


剩余400页未读,继续阅读
资源评论

 dianxin20232023-06-25资源简直太好了,完美解决了当下遇到的难题,这样的资源很难不支持~
dianxin20232023-06-25资源简直太好了,完美解决了当下遇到的难题,这样的资源很难不支持~












