
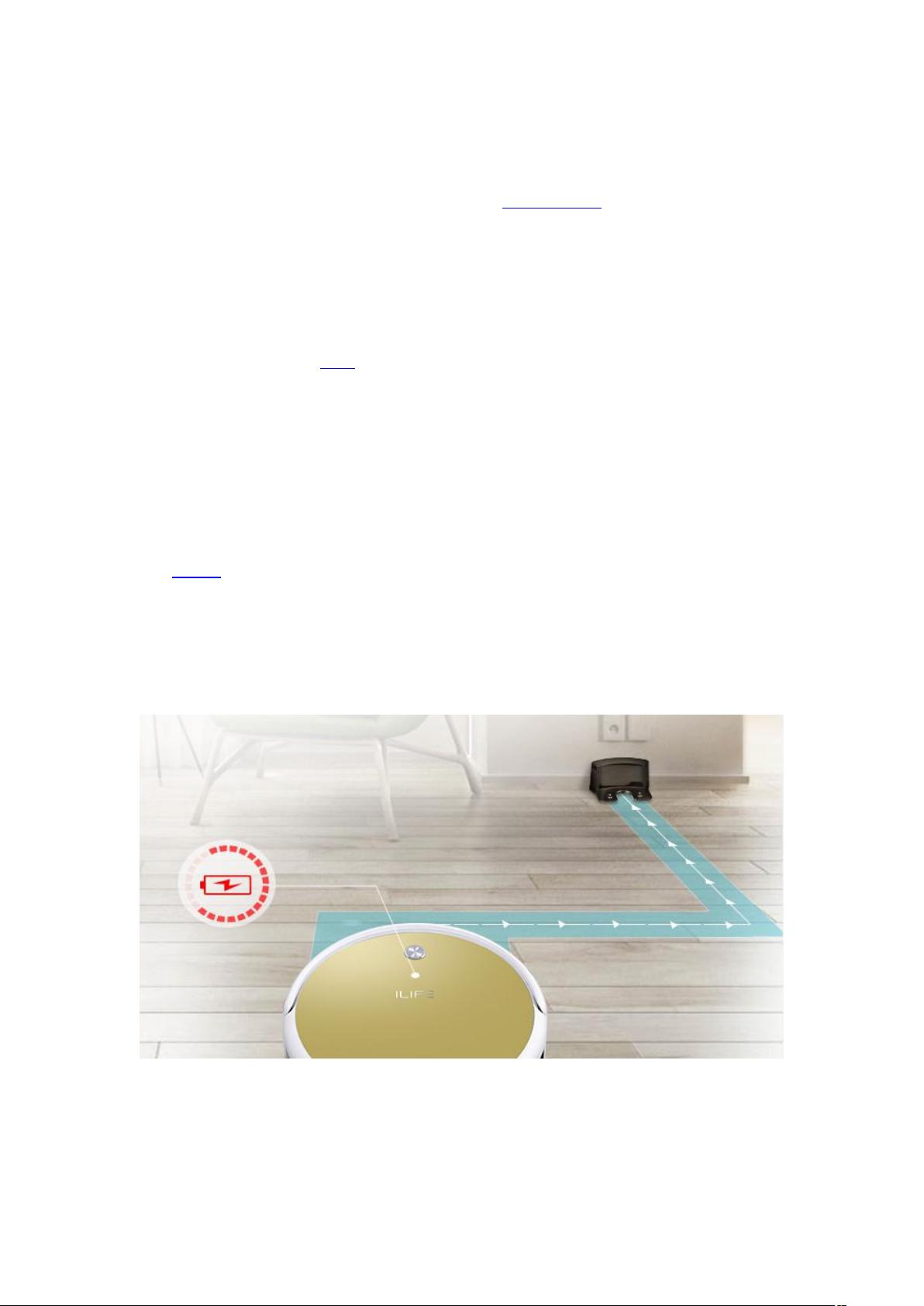
扫地机器人自动回充的技术原理
自动充电是通过充电基座不断发出信号,然后扫地机机器人顶部的接收器接收到信号,
最终找到“回家”的路,但是在某些情况下会出现无法导航,无法回到基座而搁浅在“半路
上”的情况发生。
通常这种情况发生,ILIFE 建议您首先要看它是否有自动回充功能,如果有,但不能自
动回充,那要看看充电设备安置的范围有没有磁场影响到机器人的回充。例如电脑和电视机
的电磁场。这些都会有影响,充电的设备建议放在较少电力设备的角落。这样机器人就会顺
利的自动回充。
扫地机的返航充电,有多种技术原理,有采用红外线定位的、有采用蓝牙定位的、有雷
达定位的。在扫地机器人领域主要是利用这 3 种定位技术,目前市面上 70%左右的机型都是
采用红外线定位。
红外线定位虽然精度较高,但由于这种光线无法穿透物体,使得红外线只能够在视距范
围内定位,就像我们的电视机遥控器用的红外线一样,如果有东西遮挡就失去了信号。对于
资源评论













