

引 言
1.1. 设计意义
本智能小车的设计,首先针对大学所有学习的知识是一个很好的回顾和总结。
此智能小车是基于单片机所设计的,具有自动寻迹能力,在实际的很多方面有应
用。当我们进一步的改进机器人系统时 ,可实现更重要的功能,如可设计出自
动扑火机器人等。
摘要:本课题组设计制作了一款具有智能判断功能的小车,功能强大。小车
具有以下几个功能:寻迹功能(按路面的黑色轨道行驶),蜂鸣器奏音乐;作品
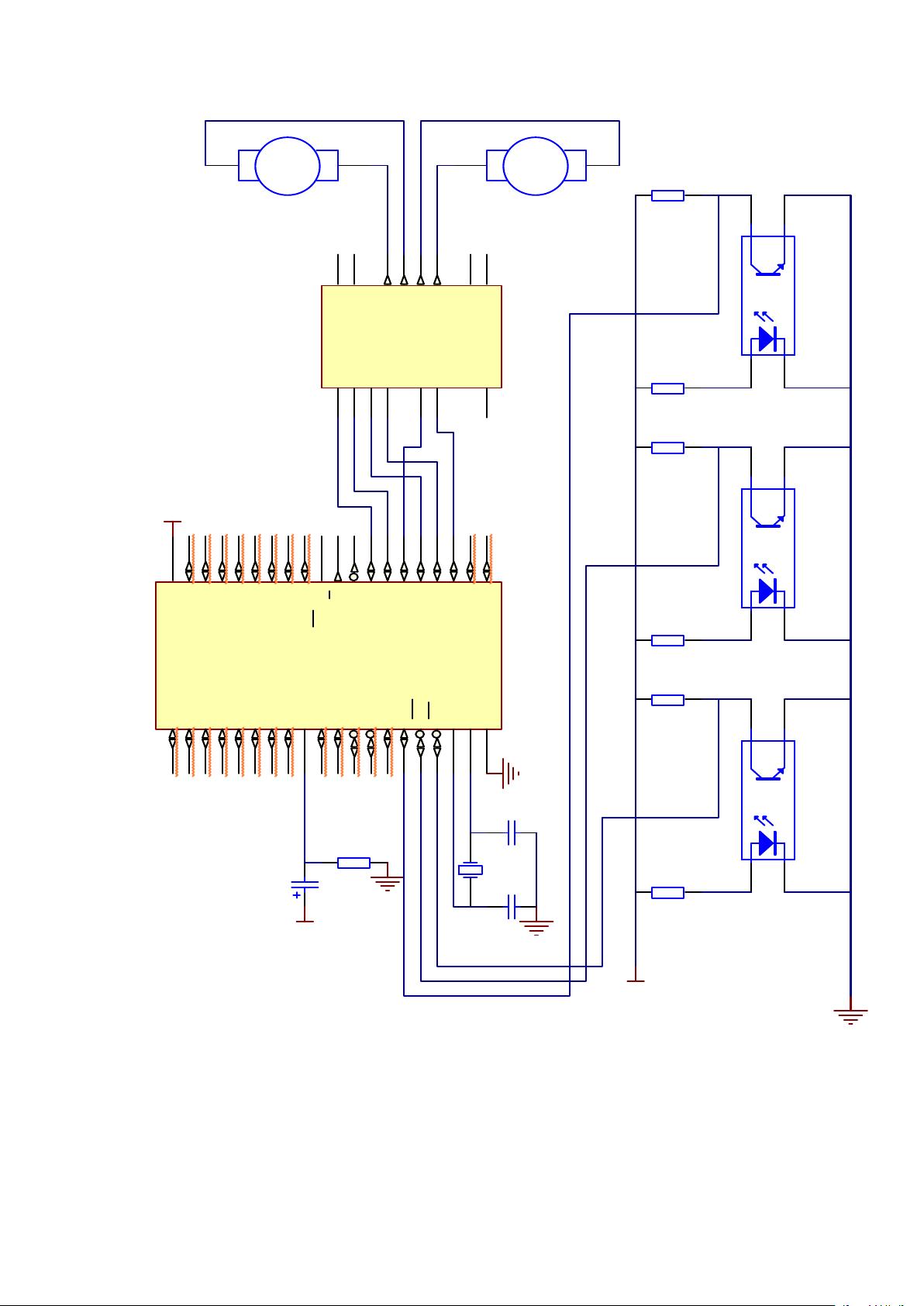
以两电动机为主驱动,通过各类传感器件来采集各类信息,送入主控单元
STC89C52 单片机,处理数据后完成相应动作,以达到自身控制。电机驱动电路
采用高电压,高电流,四通道驱动集成芯片 L298;红外发送头发射出红外光能
够接收到来判断是否有障碍,实现避障功能。
关键字:智能控制 寻迹行驶
1.2. 系统功能要求
此智能小车是基于 STC89C52 设计的具有自动寻迹能力的小车。系统可实现跟随黑色引
导线行走的能力,在行驶过程中,并能用测速传感器和光电码盘对小车速度实现实时监测。
2. 方案设计
智能小车主要分为传感器部分,最小系统部分,电机驱动部分,电源部分。
根据功能要求,提出合理的设计方案,画出方案方框图,并对系统工作原理进行
阐述。
原理,本系统的重要部分是传感器,它对整个小车的定位起到很重要的作
用,由传感器检测黑线的位置,其中黑线对光能吸收,白线对光反射。利用此原
理将红外线传感器采集到的信号转换为数字信号并送入单片机,单片机根据收到
的信号实时的控制小车的方向。控制小车的方向主要是运用 pwm 原理来控制电机
的平均电压,从而来控制电机的转速,实现小车对黑线的实时跟踪。
3. 硬件设计
3.1 电源选择方案
方案一:双电源供电。
方案二:单电源+DC/DC 转换供电。
由于电机驱动和其他芯片工作电压不一样,需各自独立供电。如用双电源供
电则需使用两个不同的电池组,占空间,且增加车体重量,从而影响车速。方案


剩余21页未读,继续阅读
资源评论


omyligaga
- 粉丝: 73
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于javaweb的在线考试系统的设计与实现(论文+源码)-kaic.doc
- 企业教育相关数据集(1992-2022年).xlsx
- Qt Creator调试全攻略:从设置断点到远程调试
- 全国地表水水质自动检测站数据集-逐4小时频率(2021年6月17日-2023年9月20日).txt
- 省级新质生产力相关词频统计数据集.xlsx
- 医药魔方:2024医药投融资交易大会-生物医药企业并购中的知识产权问题
- 高校在线考试系统的设计与实现(论文+源码)-kaic.docx
- 虚社会责任漂绿数据(2018-2022年)含do代码+计算结果.txt
- 省府县数据匹配代码.do
- 工具变量-明清进士匹配数据集.xlsx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


