

理工大学《自动控制原理》课程设计说明书
目录
摘要..............................................................................................................................................0
1 课程设计目的...........................................................................................................................2
2 设计条件及任务要求...............................................................................................................2
2.1 设计条件.........................................................................................................................2
2.2 设计任务要求.................................................................................................................2
3 设计基本原理...........................................................................................................................3
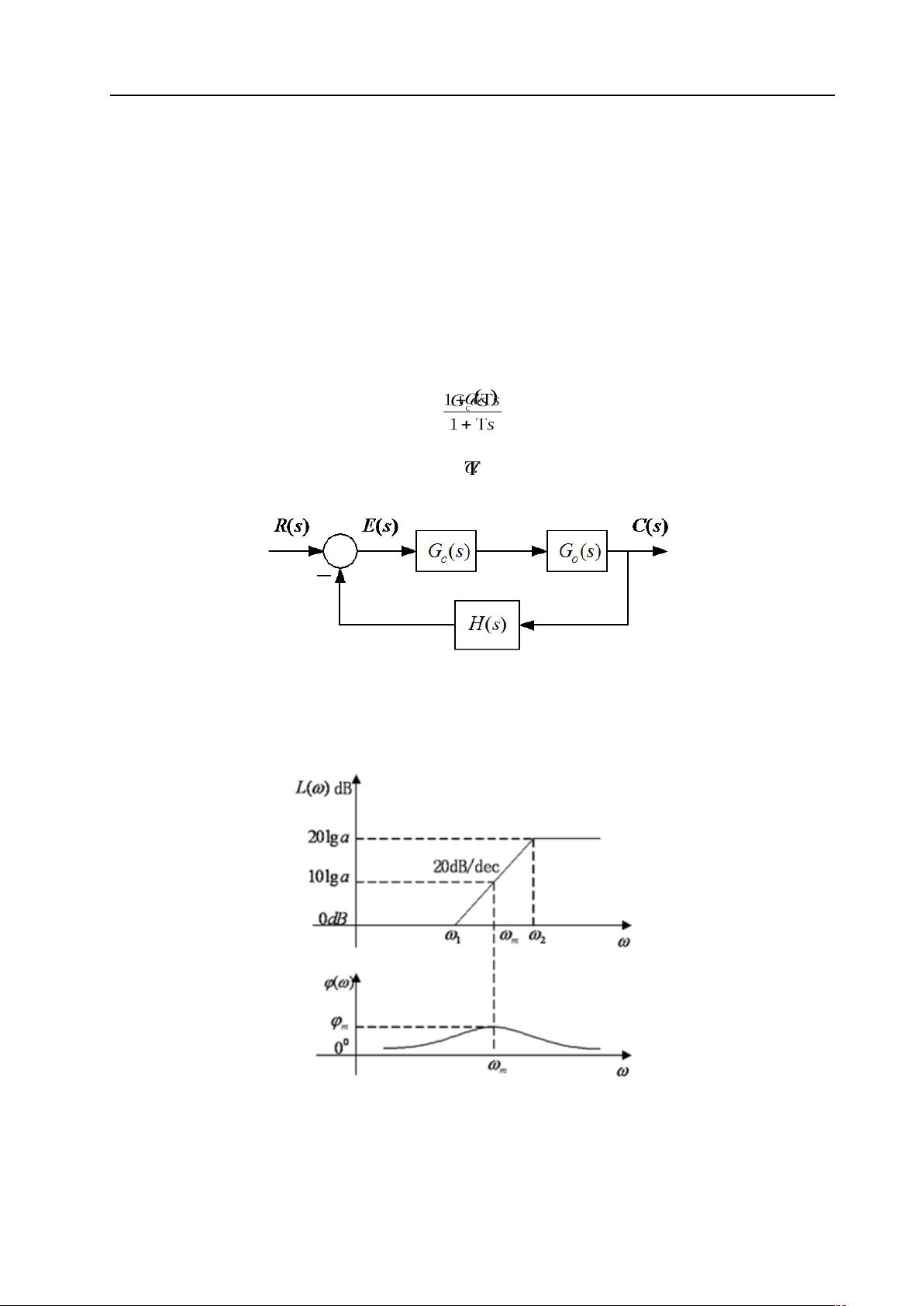
3.1 超前校正.........................................................................................................................3
3.2 根轨迹法.........................................................................................................................5
4 设计过程...................................................................................................................................5
4.1 基本思路及步骤.............................................................................................................5
4.2 校正前系统分析.............................................................................................................6
4.2.1 开环增益...............................................................................................................6
4.2.2 相位裕度和幅值裕度...........................................................................................7
4.2.3 伯德图...................................................................................................................8
4.2.4 根轨迹...................................................................................................................9
4.3 超前校正系统设计.........................................................................................................9
4.3.1 理论分析...............................................................................................................9
4.3.2 参数计算.............................................................................................................10
4.3.3 编程设计.............................................................................................................11
4.4 校正后系统分析...........................................................................................................12
4.4.1 伯德图.................................................................................................................12
4.4.2 根轨迹.................................................................................................................13
5 结果对比与分析.....................................................................................................................13
5.1 校正前后阶跃响应曲线...............................................................................................13
5.2 结果分析.......................................................................................................................14
6 总结.........................................................................................................................................15
参考文献....................................................................................................................................15
附录............................................................................................................................................16
摘要
在自动控制理论中,超前校正是相当重要的一环,对于系统的优化有很重要的意义。
用 MATLAB 进行控制系统的超前校正设计是对所学的自动控制原理的初步运用。本课程
设计先针对校正前系统的稳定性能,用 MATLAB 画出其根轨迹及伯德图进行分析,是否
达到系统的要求,然后对校正装置进行参数的计算和选择,串联适当的超前校正装置。
最后通过阶跃响应曲线对比前后系统,论证校正后的系统是否达到要求。


剩余16页未读,继续阅读
资源评论

 weixin_597741542022-12-14资源内容详实,描述详尽,解决了我的问题,受益匪浅,学到了。
weixin_597741542022-12-14资源内容详实,描述详尽,解决了我的问题,受益匪浅,学到了。
omyligaga
- 粉丝: 87
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


