

基于 stm32 的智能小车设计
- 1 -
摘要
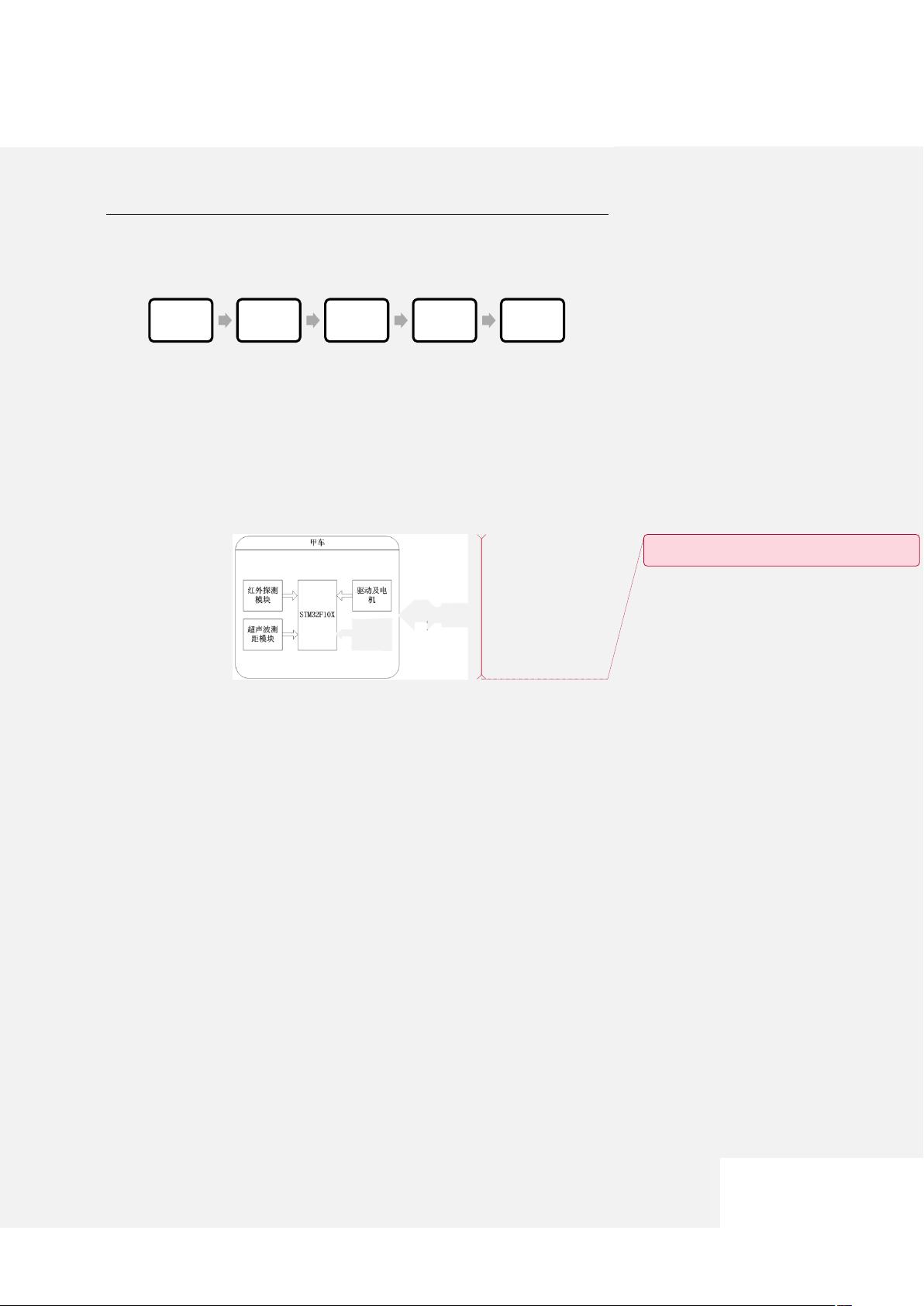
本次试验主要分析了基于 STM32F103 微处理器的智能小车控制系统的系统
设计过程。此智能系统的组成主要包括 STM32F103 控制器、电机驱动电路、红外
探测电路、超声波避障电路。本次试验采用 STM32F103 微处理器为核心芯片,利
用 PWM 技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进
行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。小车在运动时,
避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下
我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能。在
硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软
件设计方案,并在 STM32 集成开发环境 Keil 下编写了相应的控制程序,并使用
mcuisp 软件进行程序下载。
关键词:stm32;红外探测;超声波避障;PWM;电机控制
剩余46页未读,继续阅读
资源评论


单片机毕业设计-远望创客学堂
- 粉丝: 3w+
- 资源: 44









最新资源
- 矢量arcgis软件shp格式阿拉善地图
- 永磁同步电机基于正弦波注入的无感控制策略,基于高频脉冲注入的转子位置估计策略,MATLAB仿真,simulink仿真另有基于方波注入的
- 太空、航天、火箭发射知识科普
- nuitka打包过程中依赖的c++编译工具
- arcgis矢量shp格式巴彦淖尔地图
- 航天新征程航天发展历程介绍弘扬载人航天精神ppt
- 卷管打孔设备sw17可编辑全套技术资料100%好用.zip
- arcgis矢量shp格式白城市地图
- arcgis矢量shp格式白山市地图
- ①软件 程序 网站开发路面附着系数估计,采用UKF和EKF两种算法 软件为Matlab Simulink,非Carsim联合仿真 dugoff轮胎模块:纯simulink搭非代码 整车模块:7自由
- 图数据分析中基于对比学习的异常检测算法的Python实现及应用-含代码及详细解释说明
- jquery实现的翻牌带文字描述效果相册代码.zip
- arcgis矢量shp格式白银市地图
- (VHDL)基于FPGA的洗衣机设计,附工程文件
- 锂电池半自动带电液舱标准手套箱(sw16可编辑+工程图)全套技术资料100%好用.zip
- 螺母送料机自动上下料sw22可编辑全套技术资料100%好用.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


