
电机伺服控制和PID算法简介
1
电机伺服控制技术简介
所谓伺服控制,通常也就是指闭环控制,即通过反馈环节,测量被控制对象的变化,用
以修正电机输出的控制技术。
对于要求不高的应用,通常采用简单的开环控制。例如,给直流有刷电机的两根引线通
电,电机就会旋转;施加的电压越高,电机转速越高,力量越大。但是在很多需要精密控制
的场合,仅仅这种方式还是不够的,还需要依靠一定的反馈装置,将电机的转速或位置信息
反馈给微控制器或其他的机械装置,通过一定的算法变成可以调节电机控制信号的输出,从
而使电机的实际转速、位置等参数与我们所希望的一致。机器人控制是一个精度要求比较高
的领域,例如,基于以下的一些考虑,机器人平台需要使用闭环控制。
a) 开环控制情况下,移动机器人在爬坡时,电机速度会下降。更糟糕的是,当双轴独
立驱动的移动机器人以一定的角度接近斜坡时。每一个车轮转速的下降值将会不
同,结果是机器人的实际运动轨迹是沿着一条曲线而不是直线行进。
路线。
速差。
一
一定的计算方法(如 PID 算法)调整相应的电压供给,如此反复,直
到达到给定转速。
b) 不平坦的地面会造成移动机器人的两个车轮转速之间的差异。如果转速较低的车轮
的驱动电机没有得到相应的电压补给,移动机器人将偏移既定的
c) 由于安装工艺、负载不完全均衡等原因,即使是完全匹配的两个电机,并在相同的
输入电压条件下,他们的速度有时仍会产生不同,即转
d) 如果采用的是 PWM 控制,即使在 PWM 信号占空比不变的条件下,随着电池电压
的逐渐下降,电机供给电压也会随之降低,从而导致电机的转速与给定值不完全
致。
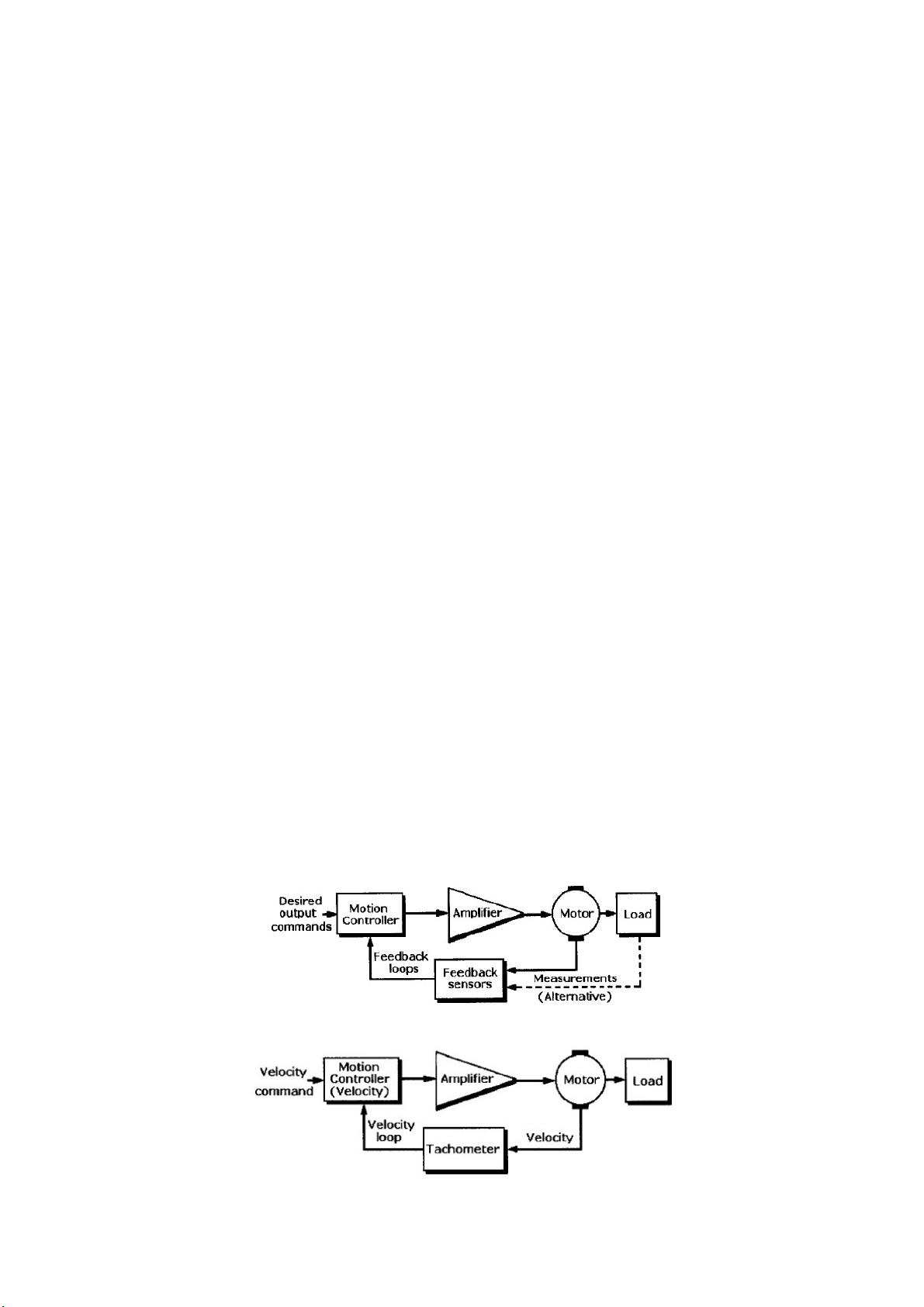
综合以上的一些考虑,必须选择闭环控制的方式,其工作流程如下图所示:闭环系统中
加上了反馈环节(通常机器人的驱动电机使用的是增量式光学编码器)。在闭环控制系统中,
速度指令值通过微控制器变换到功放驱动电路,功放驱动电路再为电机提供能量。光学编码
器用于测量车轮速度的实际值并将其回馈给微控制器。基于实际转速与给定转速的差值,即
“偏差”,驱动器按照
闭环控制模型示意图
资源评论

 zdhtmp2014-05-29挺有帮助的,谢谢!
zdhtmp2014-05-29挺有帮助的,谢谢! 谏君之2020-04-07垃圾,这种垃圾来着蹭积分
谏君之2020-04-07垃圾,这种垃圾来着蹭积分 gylinys2013-02-05非常好用的资料。
gylinys2013-02-05非常好用的资料。 gnefnaij2013-01-24非常感谢,解了我的燃眉之急
gnefnaij2013-01-24非常感谢,解了我的燃眉之急 babybluema2014-08-22非常感谢,解了我的燃眉之急
babybluema2014-08-22非常感谢,解了我的燃眉之急


maolianghua
- 粉丝: 9
- 资源: 11









最新资源
- Navicat.zip
- 麻雀搜索算法(SSA)文章复现:《基于混沌麻雀搜索算法的无人机航迹规划方法-汤安迪》 策略为:立方混沌+反向学习初始化种群+反向精英策略改进发现者策略+正余弦算法改进加入者策略+动态调整警觉者
- “田园风光在线”:打造村旅游信息平台
- Ollama.zip大模型
- 土地利用/土地覆盖数据(蚌埠市)对应代码表
- 基于Unity 3D的旅游景点漫游设计
- 基于混沌-高斯变异-麻雀搜索算法(CGSSA)优化BP神经网络(CGSSA-BP)的回归预测(含优化前后对比)MATLAB代码 代码注释清楚 main为主程序,可以读取EXCEL数据 很方便
- xyy_localhost-2024_12_24_14_32_06-dump.sql
- C++模板与泛型编程入门教程:代码重用与类型安全
- 面向对象编程语言Objective-C基础语法详解及应用
- MATLAB在ThingSpeak中应用信号处理与数据可视化的技术实现
- VMware.zip虚拟机
- CFA知识点梳理系列:CFA Level II, Reading 6 Economic Growth
- goland 2024直接使用到2099年
- SecureCRT-9.6.0-mac
- Python 自动办公- Python分类汇总278张Excel表中的数据 Python源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


