一、项目简介
基于机器视觉模块 OpenMV 采集车道、红绿灯、交通标志等模拟路况信息,实
现一辆能车道保持、红绿灯识别、交通标志识别、安全避障以及远程 WiFi 控制
的多功能无人驾驶小车。
编程软件:
硬件模块
编程软件
OpenMV
使用 OpenMV 官方的 OpenMV IDE
ESP8266
使用 Arduino 官方的 Arduino IDE
STM32
使用 ARM 官方的 Keil uVision5(ARM
版)
功能介绍:
硬件模
块
功能实现
OpenMV
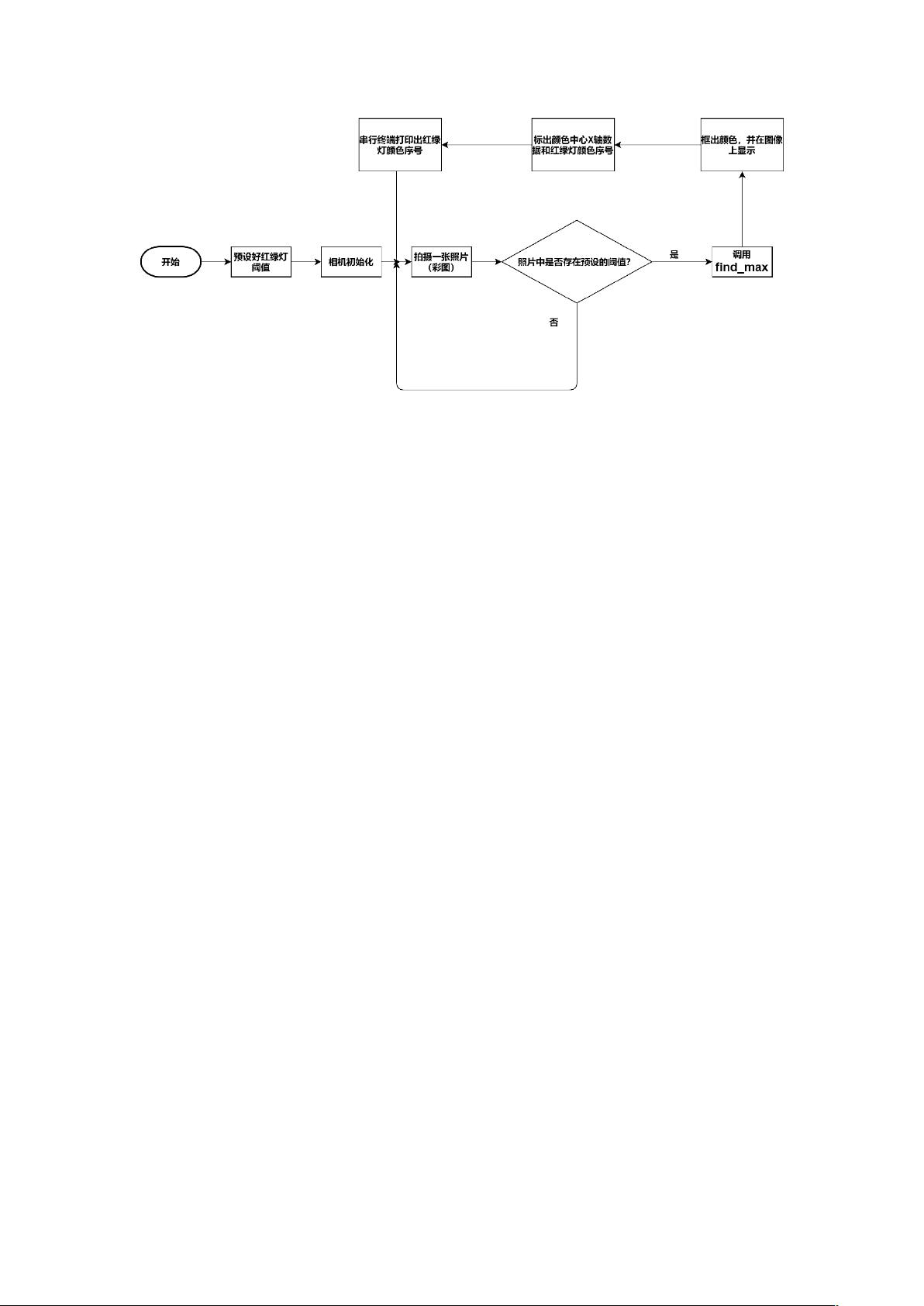
主要是利用 OpenMV 进行路况信息(红绿灯、交通标志、车道)的采
取,以及和 STM32 的通信,具体看 OpenMV 文件夹。
ESP8266
主要是利用 ESP8266 与手机端进行远程的指令接收和数据交互,以及和
STM32 的通讯,具体看 ESP8266 文件夹。
STM32
主要是通过 ESP8266 接收远程控制指令和处理路况信息,并根据这些指
令数据进行实时的 PID 控制小车运动。具体看 STM32 文件夹。
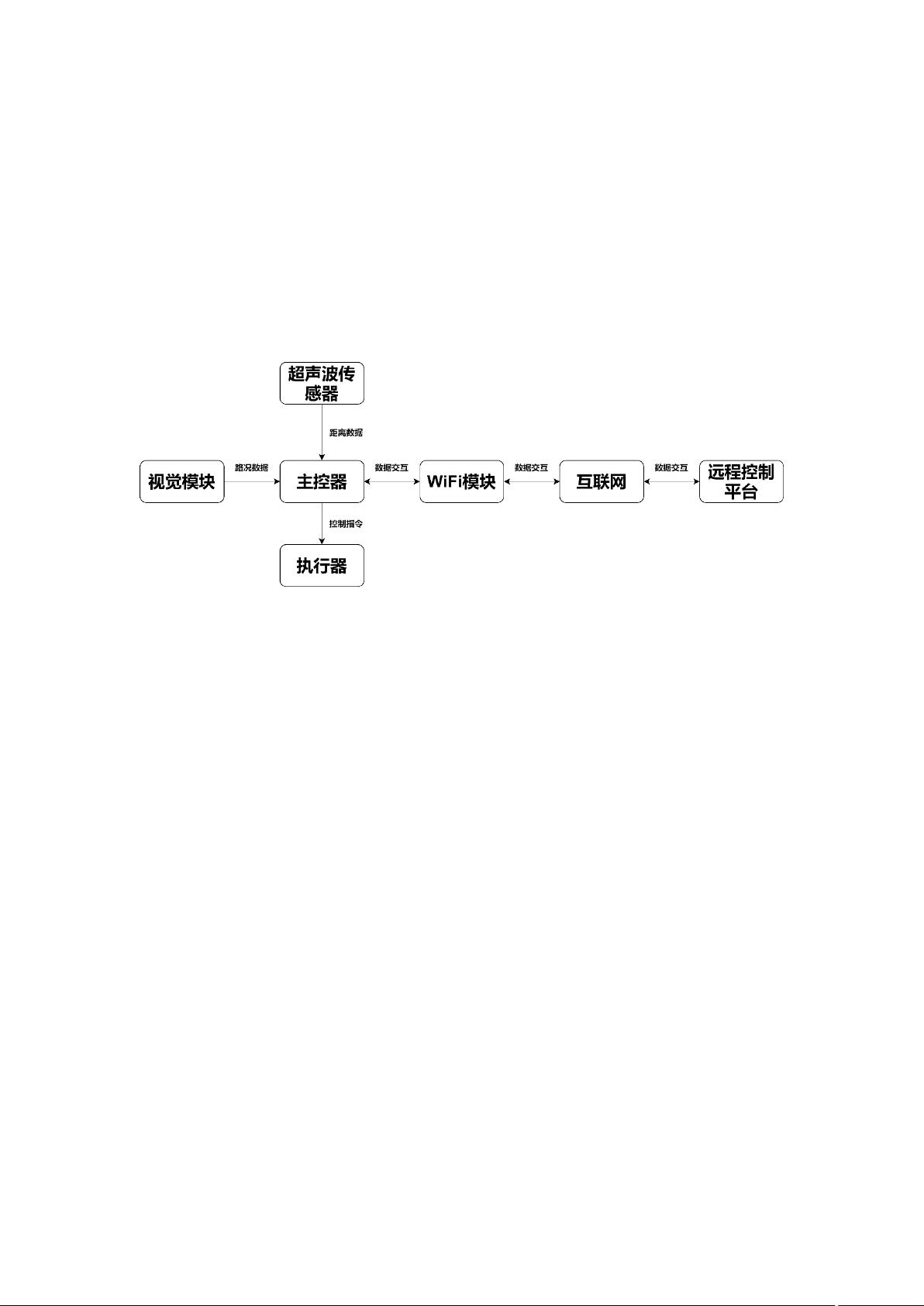
二、硬件系统
本项目《基于 OpenMV 的无人驾驶智能小车模拟系统》,主要依靠机器视觉模
块 OpenMV 通过图像处理的方式获取实时的路况信息,以及超声波传感器获取