西门子1200系列PLC控制的三轴运动机械手在自动化生产线中的应用,是一种高效的物料搬运解决方案。这种机械手通常由三个独立的伺服电机驱动,分别控制X、Y、Z三个轴向的运动,实现精确的产品抓取与放置。
一、轴组态基本参数
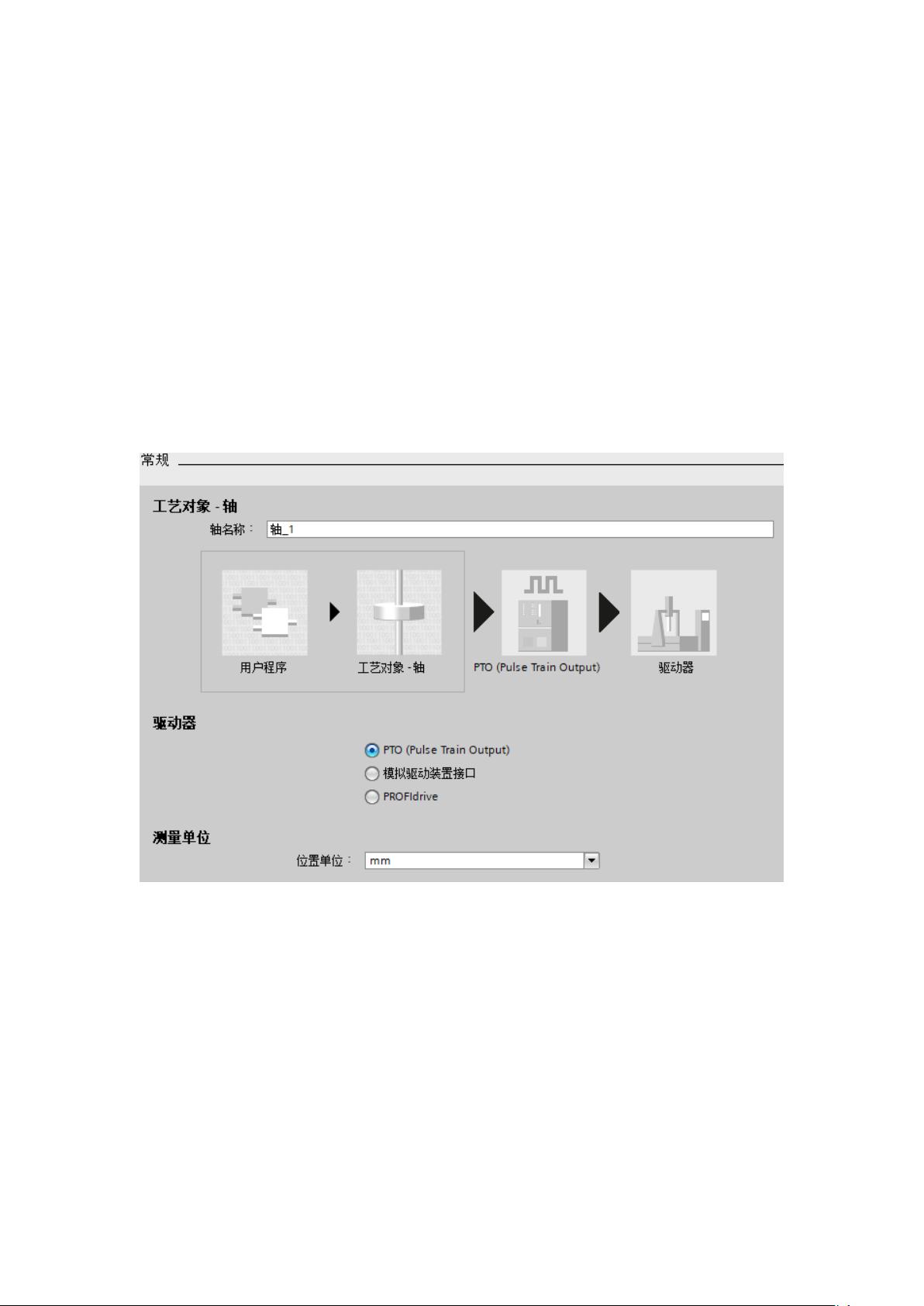
1. 常规驱动器机械:根据实际设备配置,西门子1200系列PLC可以连接不同型号的伺服驱动器和电机,为每个轴提供动力。在配置时,需要设定电机的类型、额定功率、转速等参数,确保与机械手的设计要求相匹配。
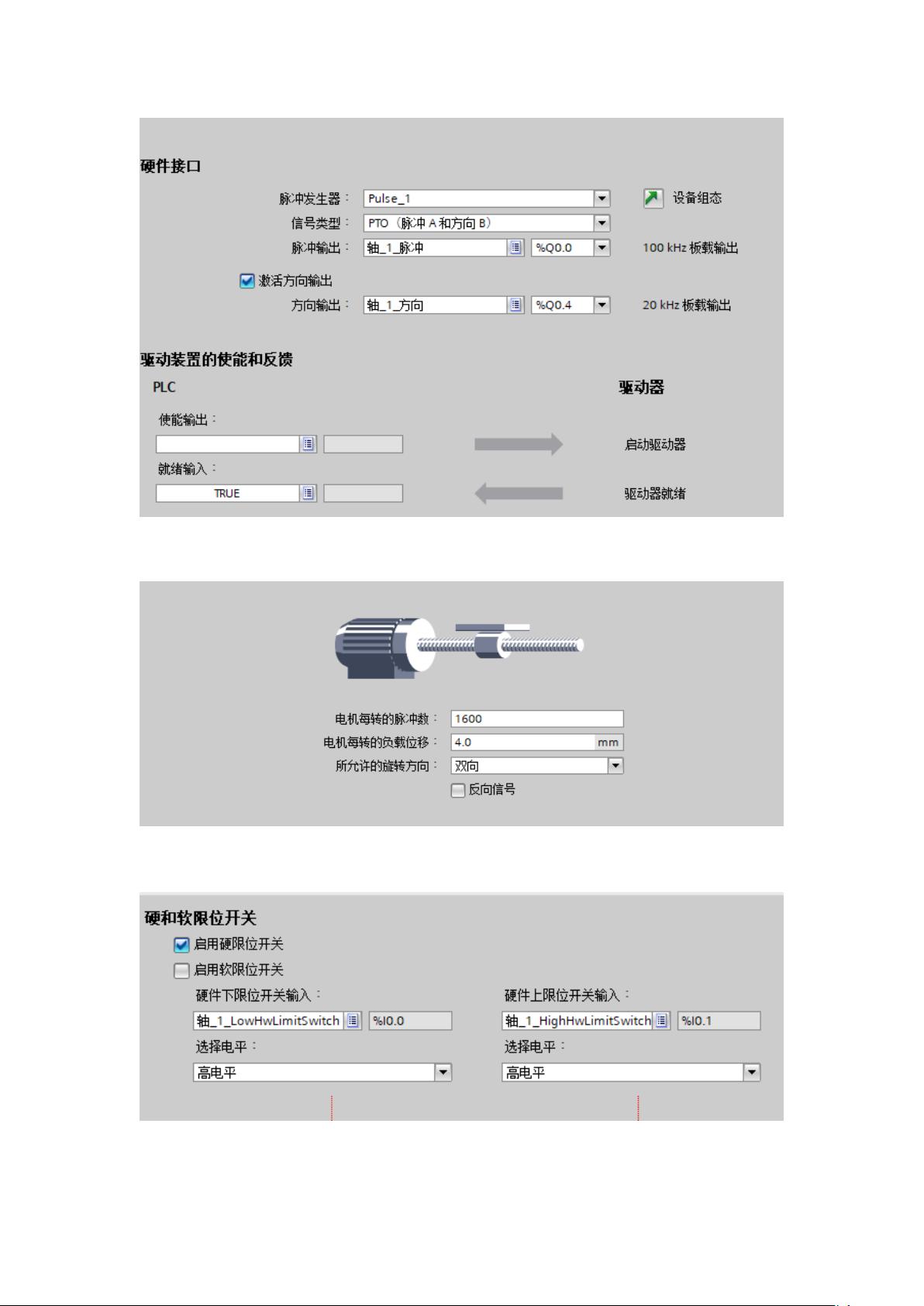
2. 位置限制:为了防止机械手超出工作范围,需要设置每个轴的安全限位。这包括最大和最小行程,以及安全停止位置,以确保设备运行安全。
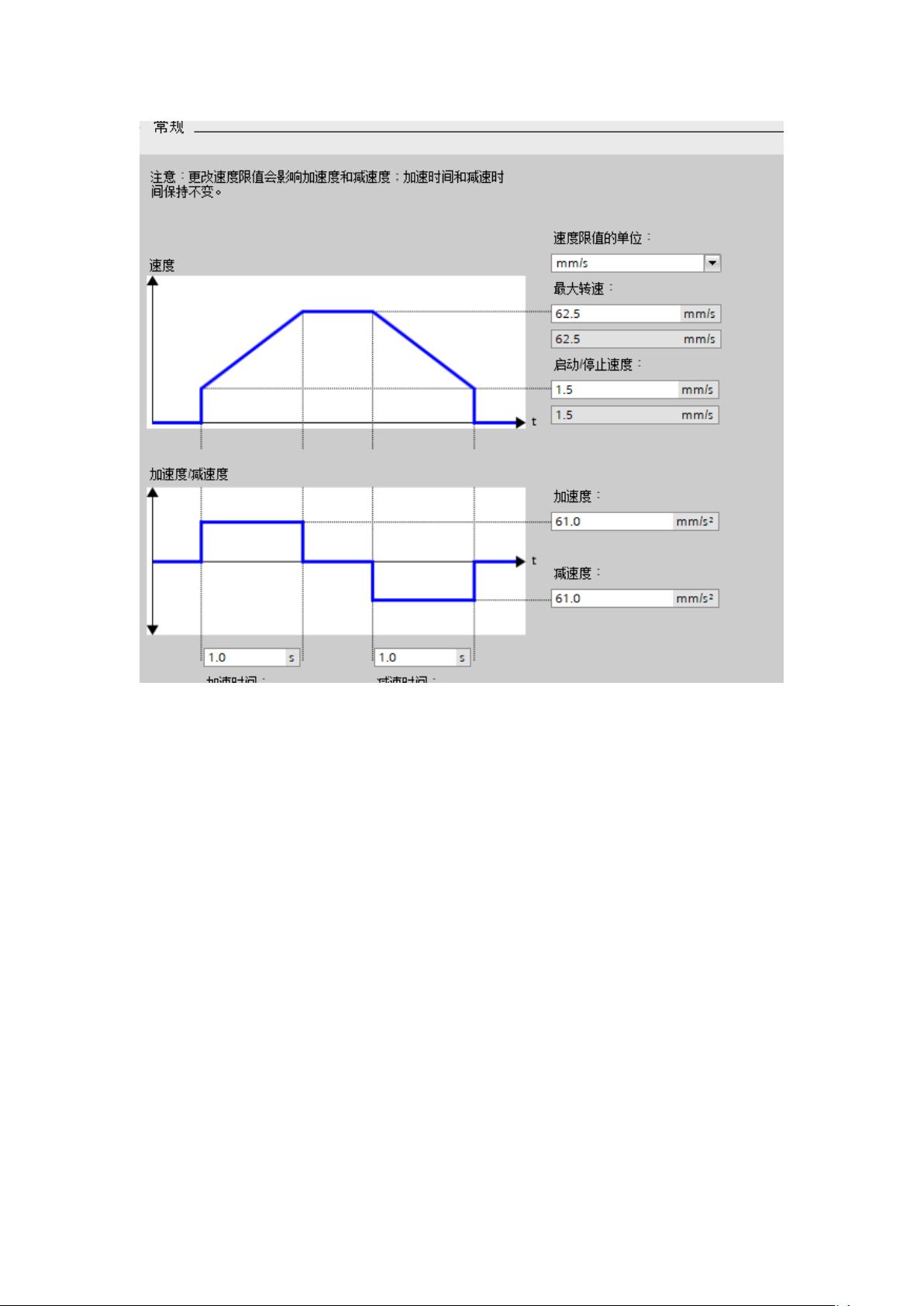
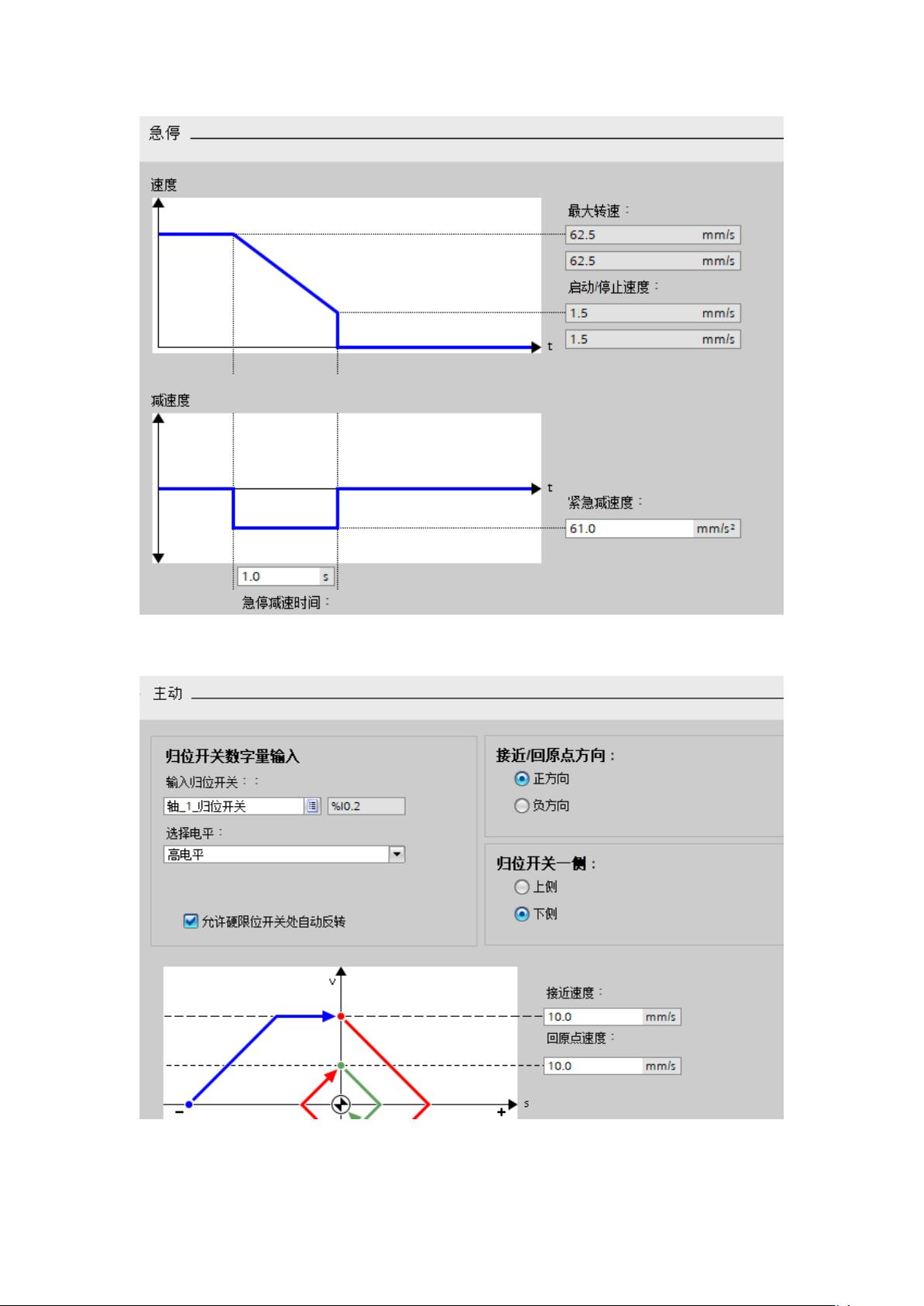
3. 动态常规急停回原点:在紧急情况下,系统会触发急停功能,机械手将迅速停止并返回预设的初始位置。此处的“主动被动”可能指的是急停模式,主动表示由用户手动触发,被动则可能是由系统检测到异常自动触发。
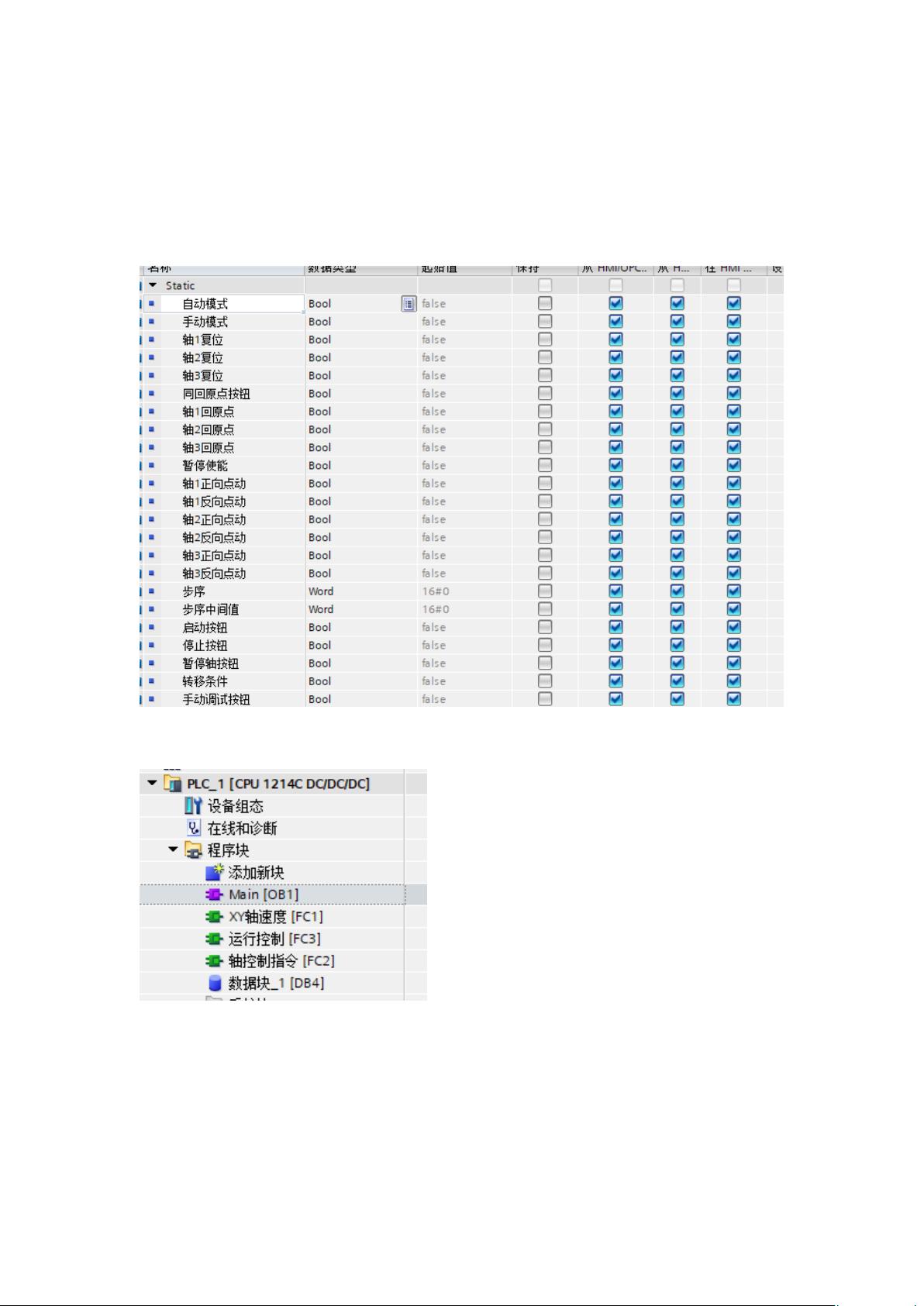
二、DB数据块建立
DB(Data Block)数据块是西门子PLC编程中存储变量和参数的重要工具。在三轴机械手的应用中,可能需要创建多个DB块,如:
1. 存储各个轴的位置、速度和加速度信息。
2. 记录机械手的状态,如是否正在执行任务、是否有故障等。
3. 设置和存储控制逻辑所需的参数,如动作顺序、时间间隔等。
三、程序编写
1. 主程序:这是整个系统的控制核心,调用其他功能块来完成任务。例如,主程序可能首先初始化系统,然后循环检查输入信号,根据这些信号决定机械手的动作。
2. FC块(Function Block):FC是可重用的程序模块,通常用于实现特定功能。在这个场景中,可能有专门的FC块负责速度换算,将PLC接收到的速度指令转换为电机可以理解的信号。
3. 运行控制:这可能是一个FC或OB(Organization Block),负责控制机械手的运行流程,包括启动、暂停、停止和错误处理。它可能会调用速度换算FC,根据设定的路径和速度命令,控制每个轴的伺服电机运行。
总结来说,西门子1200三轴运动机械手搬运系统通过精细的PLC编程,实现了对产品搬运的自动化控制。从轴的参数设置、数据块的建立到程序的编写,每一环节都体现了自动化技术的精度和效率,为现代化生产线带来了显著的效益提升。