上下料机器人PLC控制系统设计.pdf
110 浏览量
2023-06-29
13:23:36
上传
评论
收藏 1.24MB PDF 举报


目 录
一、设计思路
................................................................................................................
1
1.设计的思路及采用的手段和技术方法
.......................................................
1
1.1 设计的任务
................................................................................................
1
1.2 设计的思路
...............................................................................................
1
1.3 设计的手段和技术方法
............................................................................
1
二、 设计过程与说明
..................................................................................................
4
1.设计过程
.............................................................................................................
4
2.功能说明
.............................................................................................................
4
2.1 气动机械手的控制要求
............................................................................
4
2.2 系统的控制面板操作与工作方式
............................................................
5
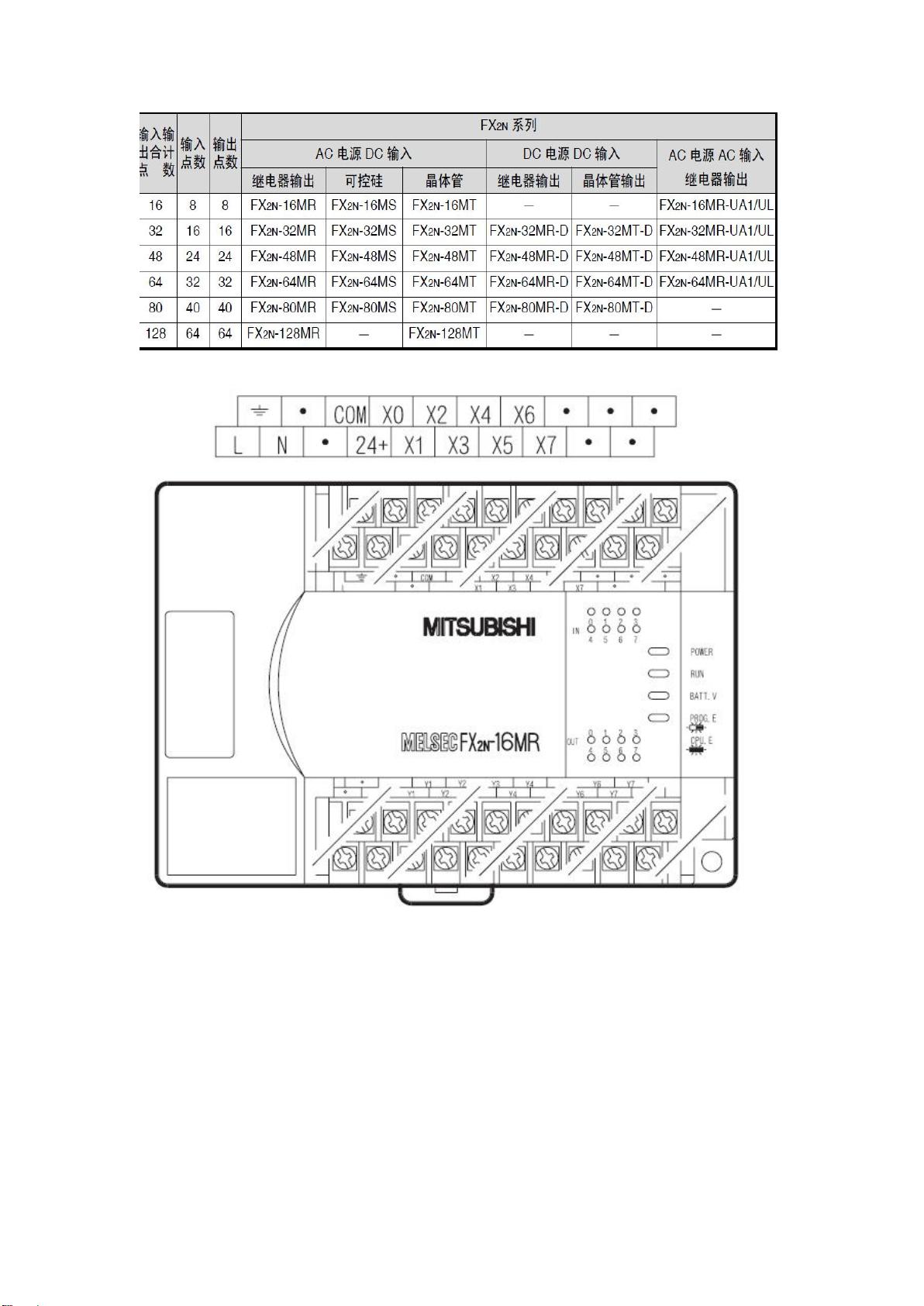
3.可编程控制器的 CPU 选择
.................................................................................
7
4.控制系统的 I/O 地址分配表
.............................................................................
8
5.PLC 外部接线图
..................................................................................................
9
6.控制系统流程图
...............................................................................................
10
7.程序设计梯形图
...............................................................................................
11
8.设计过程中碰到的问题与解决方法
...............................................................
15
9.设计佐证材料
...................................................................................................
15
三、设计成果简介
......................................................................................................
16
1.控制系统的技术特点
.......................................................................................
16
2.设计总结与不足
...............................................................................................
16
3.设计作品展示
...................................................................................................
17
3.1 PLC I/0 分配表
......................................................................................
17
3.2 PLC 外部接线图
......................................................................................
18
3.3 控制系统流程图
......................................................................................
19
3.4 程序梯形图
..............................................................................................
20
五、参考文献
..............................................................................................................
25


剩余24页未读,继续阅读
资源评论













