Siemens-840D数控编程.doc
87 浏览量
2022-11-30
17:11:43
上传
评论
收藏 1.52MB DOC 举报


第一讲:基本概念
1、西门子系统简介:
常见系统有 802S/C 系统、802D 系统、810D 系统和 840D 系统。其中,西门子 802S/C 系统是西门子
公司专门针对中国用户开发的一款系统。目前西门子系统在中国市场得到了广泛的应用,西门子 840D 更
是以高端系统出现。
西门子系统与 FANUC 系统的比较
2、基本概念
2.1 插补功能:指定刀具沿直线轨迹或圆弧轨迹移动的功能称为插补功能。
它属于准备功能,用 G 代码后跟若干位数字来表示。
2.2 进给功能:用于指定刀具运动速度的功能。
单位为 mm/min。用 F 指令
2.3 参考点:一个固定的点,是机床生产商通过行程开关设定的一个特定位置。在数控操作中所谓
的“回零”回的就是此点。
2.4 机床原点(零点):即机床坐标系的原点,也是一个固定点。它是机床制造商在制造、校正机床
时设定的一个特殊位置。
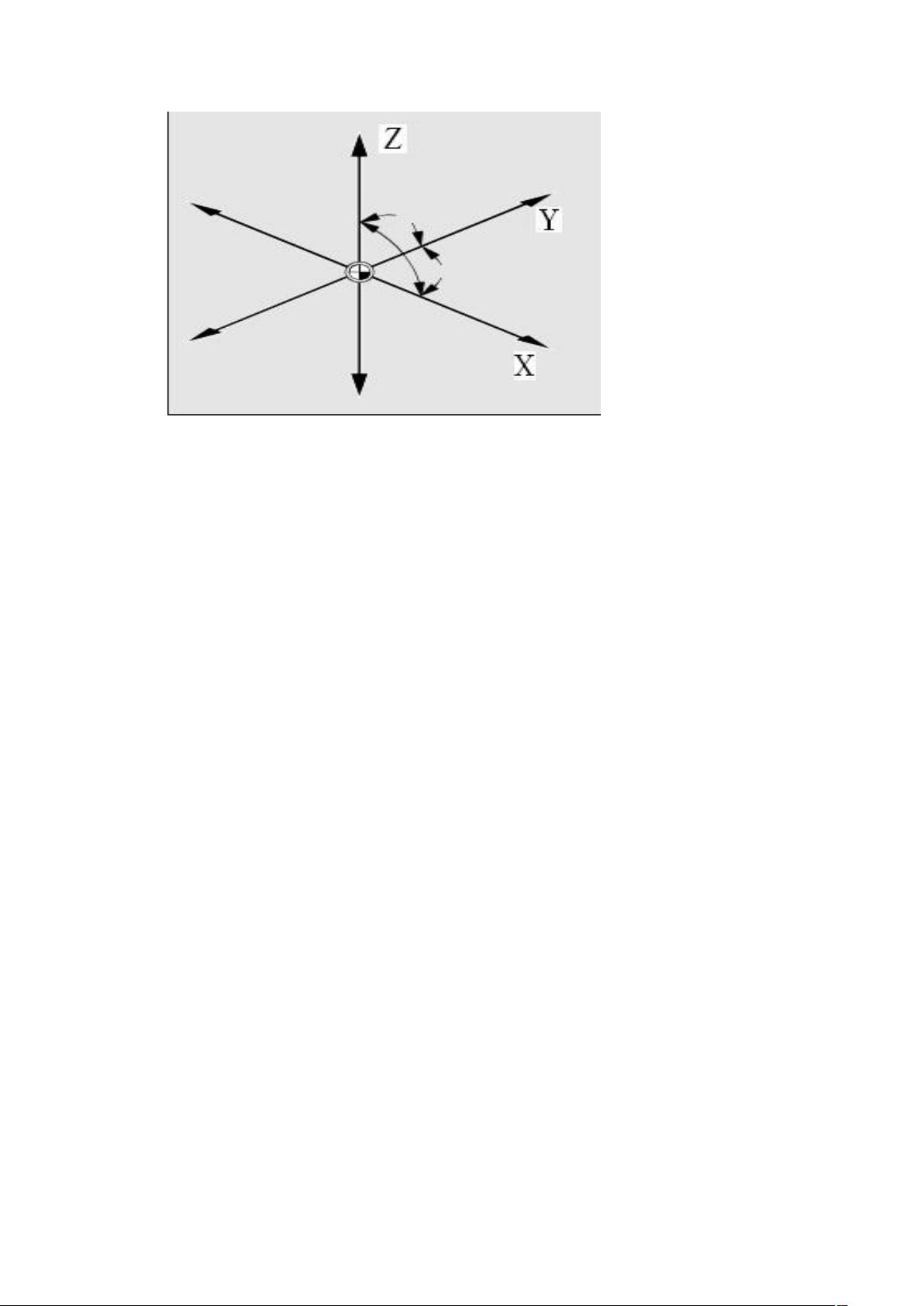
2.5 坐标系:在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编
程坐标系。
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:



剩余98页未读,继续阅读
资源评论













