
1 前言
数控机床进给伺服系统由伺服电路、伺服驱动装置、机械传动机构及执行部
件构成。它作用是:接受由数控系统发出进给位移和速度指令信号,由伺服驱动电
路作一定转换和放大后,经伺服驱动装置(直流、交流伺服电机、直流电机、功率
步进电机、电液伺服阀—液压马达等)相机械传动机构,驱动机床工作台、主轴头
架等执行部件实现工作进给和迅速运动。
数控机床进给伺服系统与普通机床进给系统有本质上差别,它能依照指令信号
精准地控制执行部件运动速度与位置,以及几种执行部件按一定规律运动所合成运
动轨迹。发展高性能数控进给伺服系统,在很大限度上决定了机床加工精度、表面
质量和生产效率。数控进给伺服系统性能取决于构成它伺服驱动系统与机械传动机
构中各环节特性,也取决于系统中各环节性能参数合理匹配。以伺服驱动装置与控
制调节器为中心伺服驱动系统已有较成熟理论分析、实验研究和设计办法。
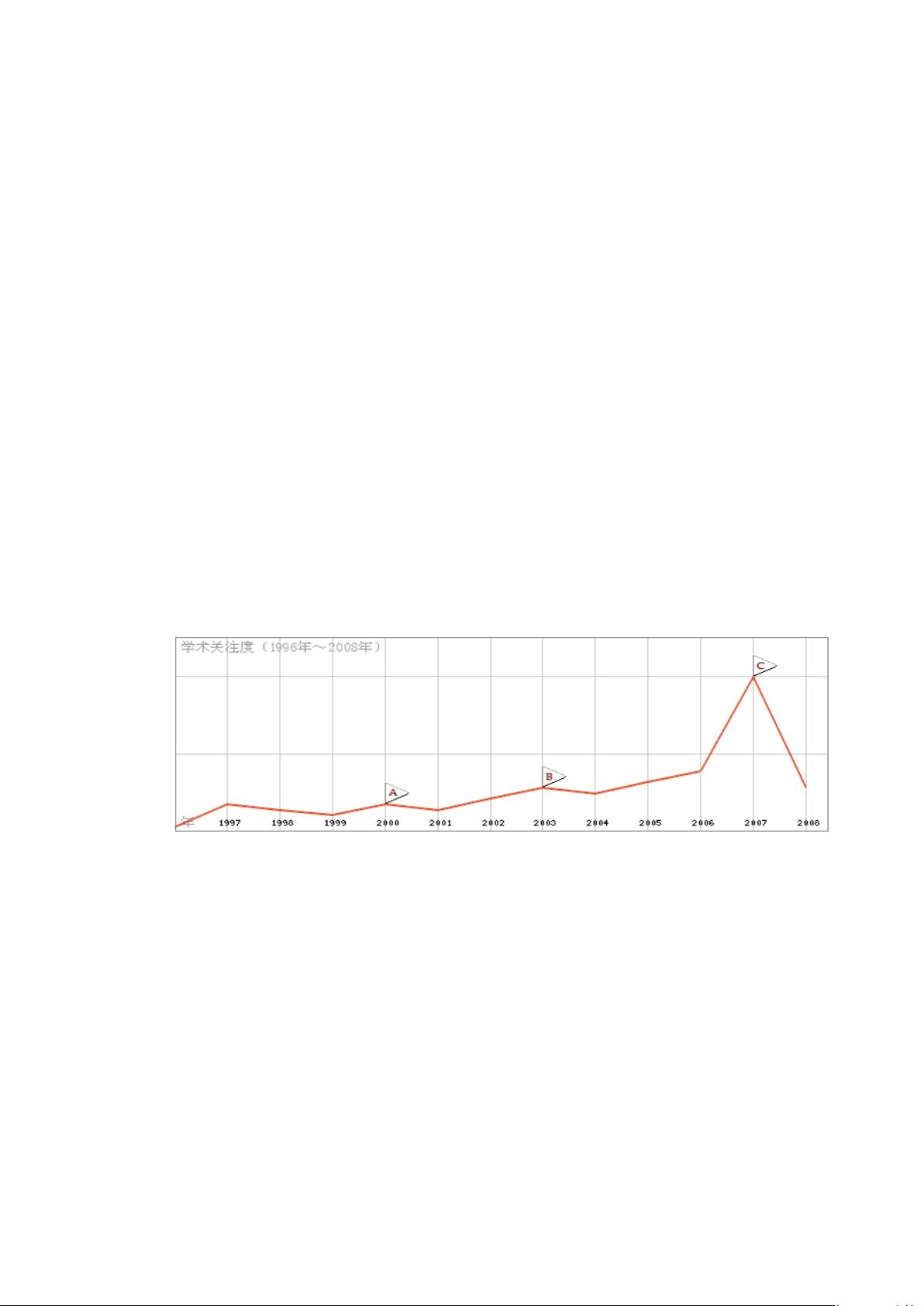
图 1.1 数控进给系统在 CNKI 中所受关注度(来源于 CNKI 学术趋势)
由图 1.1 可以看出,数控进给系统研究,近年来也逐渐受到诸多学者注重,她
们也进行了不少工作,并获得了一定得进步。这些进步均有效地增进了进给伺服系
统技术发展,进给系统功能也随之得到了巨大提高。但是,若只有单轴进给系统精
度等各方面性能优越是不够,在双轴或多轴系统中,它们各自不一定可以完全发挥
各自优越性,这样就会导致严重资源挥霍,不利于实际生产。只有在各个进给系统
之间参数密切配合才可以将每个进给系统性能发挥到极致,这样就有效地提高了资
源运用率,对实际生产才有益。


剩余68页未读,继续阅读
资源评论


yyyyyyhhh222
- 粉丝: 464
- 资源: 6万+









最新资源
- 石墨烯 钙钛矿太阳能电池COMSOL仿真:光电热耦合模型
- BoostPFC闭环CRM开关电源模型Matlab BoostPFC模型,闭环控制,CRM临界导通模式,ZCS零电流关断 开关电源PFC,适合入门学习使用,带参考文献 仿真模型使用MATLAB 2
- 基于TCP协议的分布式应用请求复制(TCPCopy)设计源码
- 双向clllc谐振变器基波分析法下电压增益与品质因数Q和电感比k的关系,用matlab做得文件,可以改不同的值,得到不同的曲线
- 基于Java与前端技术的MBTI职业性格测试系统设计源码
- 基于Vue框架的在线音乐系统设计源码
- 魔术轮胎公式验证 matlab与simulink联合仿真验证魔术轮胎模型,通过对比魔术轮胎公式计算的轮胎侧偏力与carsim输出的侧偏力来验证
- 基于Java开发的阿东技术顾问yeb_back001设计源码
- 基于鸿蒙系统的OpenGL图形编程学习设计源码
- 车辆二自由度动力学模型验证 matlab与simulink联合仿真车辆二自由度动力学模型验证,将相同的前轮转角和车速输入carsim和动力学模型,对比carsim和二自由度动力学模型输出的横摆角和车辆
- 基于PHP、HTML、CSS、JavaScript的通用知识竞赛小程序设计源码
- 车辆运动学模型验证 matlab与simulink联合仿真车辆运动学模型验证,将相同的前轮转角和车速输入carsim和运动学模型,对比carsim输出和运动学模型的输出
- 自动驾驶轨迹跟踪控制-纵向mpc横向lqr 轨迹和路径不同,注意是轨迹跟踪不是路径跟踪 模型可以提供前轮转向 后轮转向 四轮转向三种模型,多套模型打包有优惠 跟踪五次多项式道轨迹,纵向控制已经制作好
- 基于Java_SpringBoot的医院综合业务管理系统设计源码
- 上位机采用Labwindows CVI编写,下位机采用RTX64实时系统编写,上位机和下位机通过共享内存通讯,下位机控制周期是1ms,上位机保存的数据为TDMS格式,可以通过NI Diadem软件进行
- 基于Vue的HQ-ADMIN后台管理框架设计源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


