
RO备Ot
Tech,.o}007
基于主从式单片机机器人多关节联动控制系统
李磊,王志明,朱敬德,陆筠
(上海大学机电工程与自动化学院,上海200072)
捧I蠢簧:i{给避了鼍釉基于圭从式单片机的机器人多关节控制系统,该系统冥豢囊蒺绫变耍参数,端曩扩展性好、易于高
i§霹囊唧霉谚零候警优点,可广泛应用手各种机器人关节联动控翩。
。‘j—j爹磐鬻鬈警。j蠢薯j警j
j
i
美疆镝5≤孽冀机:机器人;|多关节控制
叠≯誊。≯誊。毫簟叠_≯。一
旁图分类号:TP242.6’
文献标识码:A
文章编号:∞p2..23S:3{鞠酾j泌。00醴一0≯’
Study
on
Robot
Multi—Joint
Cont叫Syst咖Based仰sin殍e
Chjp
Computer
LI
Lei,
WANG
ZlIi—ming,ZHU
Jing—de
LU Yun
(Sch001“Mechatmnics
Enginee“ng&Automati0Il,Shanghai
Unjversjty,Sha“ghai
200072,China)
Abstract:This
paper
have
giVen
a
kind
of
based
on
single
nat
machine
f.0珊mul“一joint
robot
contml
system,this
system
have
in
systematic
change
parameter
fhnction,port
development
is
good,is
easy
to
contr()1
with
high
speed,low(10st
etc.
advantage,may
apply
extensiVely
in
Various
robot
joints
unite
moVe(:ont“)1.
Key订oriIs:single
chip
computer;robot;multi_j()int
c()ntrol
本文提出了一种基于主从式单片机的机器人多关节
控制系统。在这种系统中以主单片机为主控制器,从单片
机为关节驱动控制器,一个关节对应一个从单片机,形成
独立的控制环,并且电机的数量可以根据实际情况动态
修改。这种控制结构设计方便、速度快、开发周期短、可靠
基金项目:2004年上海市教委项目(04AB39)
性高、安全性强,同时这种系统具有可在系统改变参数、
扩展性好、不占用CPU、易于高速控制、成本低等优点,可
应用于各种机器人关节控制。
1总体结构
基于主从式单片机的机器人关节控制系统采用模块
化的体系结构,原理图如图l所示,其各个模块相对独立
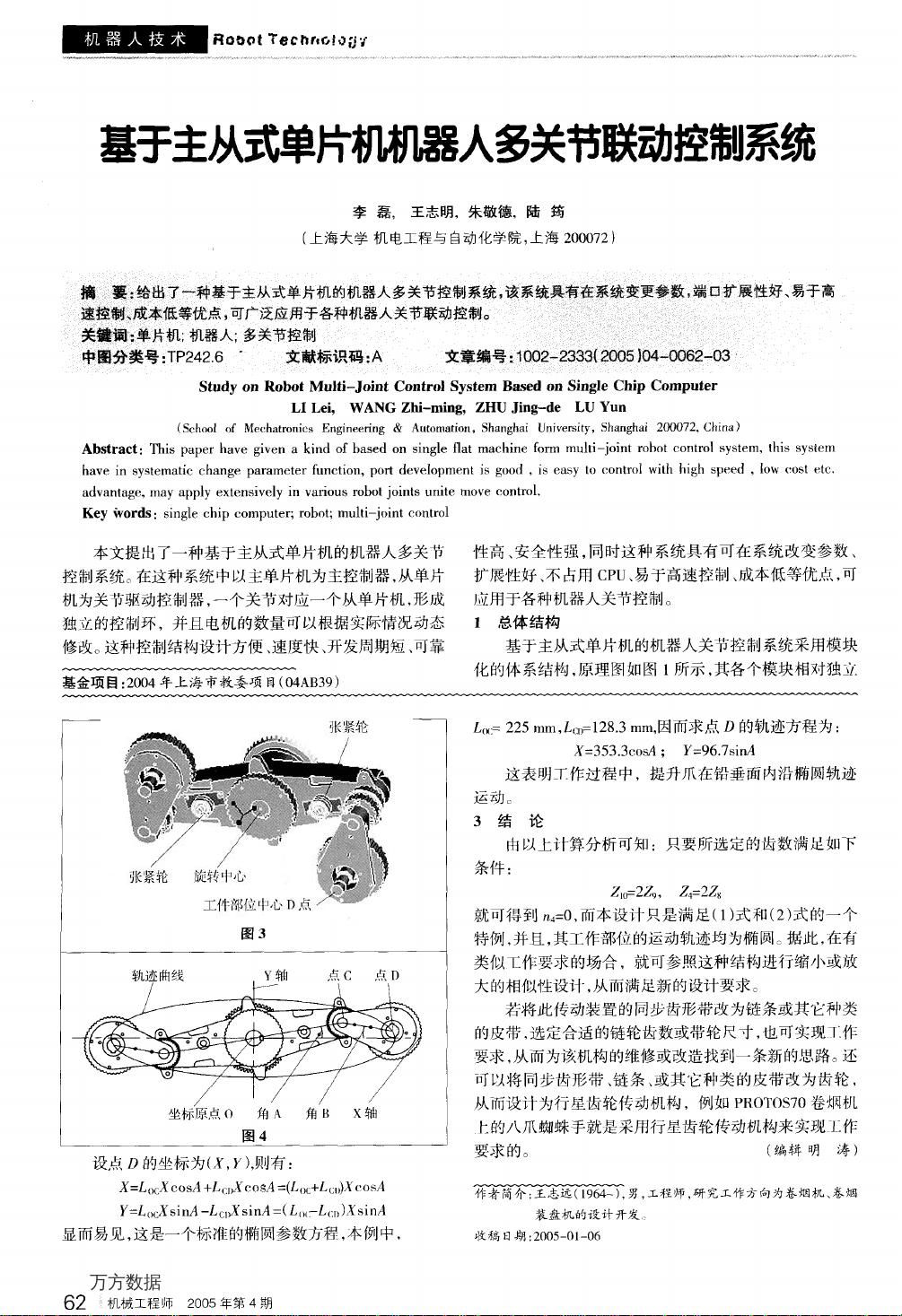
设点D的坐标为(置,y),则有:
X=LocXcos4+LI:I拶co当A=(L()c+L【.10又cosA
y=L()cXsinA—LclⅨsinA=(L(¨一L(:I))Xsin4
显而易见,这是一个标准的椭圆参数方程,本例中,
62。机械工程师2005年第4期
L。。F
225
mm,Lc。F128.3
mm,因而求点D的轨迹方程为:
X=353.3cosA:
y=96.7si以
这表明_T作过程中,提升爪在铅垂面内沿椭圆轨迹
运动。
3结论
由以上计算分析可知:只要所选定的齿数满足如下
条件:
Zl()=2毛,
五=2磊
就可得到忍。=0,而本设计只是满足(1)式和(2)式的一个
特例,并且,其工作部位的运动轨迹均为椭圆。据此,在有
类似1二作要求的场合,就可参照这种结构进行缩小或放
大的相似性设计,从而满足新的没计要求。
若将此传动装置的同步齿形带改为链条或其它种类
的皮带,选定合适的链轮齿数或带轮尺寸,也可实现1:作
要求,从而为该机构的维修或改造找到一条新的思路。还
可以将同步齿形带、链条、或其它种类的皮带改为齿轮,
从而设计为行星齿轮传动机构,例如PRoTos70卷炯机
t的八爪蜘蛛手就是采用行星齿轮传动机构来实现工作
要求的。
(编辑明涛)
作者简介:王志远(1964~),男,工程师,研究工作方向为卷烟机、卷烟
装盘机的设计开发、
收稿日期:2005—01一06
万方数据
资源评论


yyyyyyhhh222
- 粉丝: 467
- 资源: 6万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 时间戳同步方式讲解,message-filter 互斥锁 以及融合队列
- docker-compose搭建一整套前、后端分离系统部署涉及到mysql5.7、mysql8.0,nginx1.23、redis6、vue、jar包(springboot)
- 基于自监督三维语义表示学习的视觉语言导航
- sqlcipher连接工具(windows)
- 华为AP8050DN胖固件
- OfficeAI助手是一款免费的智能AI办公工具软件,专为MicrosoftOffice和WPS用户打造
- C语言从0到1教程包含源码和案例
- 台达DVP PLC与多台变频器通讯编程详解:昆仑通态接线方式与设置指南,实现频率设定、启停控制和状态读取指示功能,台达DVP PLC与3台台达VFD-M变频器通讯程序 实现频率设定、启停控制与状态读取
- 资源获取工具分享(轻松获取文档、小说、音乐、视频资源)
- vue3-element-template
- 基于go语言的GUI框架fyne开发的俄罗斯方块游戏
- 电子商务_前后端分离_管理系统_毕业设计_1740825497.zip
- 电子科技_本科论文_LaTex模板_1740825154.zip
- 电子科技大学本科毕设论文_LaTeX模板_1740824992.zip
- 计算机电子商城管理技术_用户购物体验提升系统_1740825257.zip
- 电子桌牌项目.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


