汇川机器人动态跟随应用.pptx

需积分: 0 26 浏览量
更新于2024-07-14
1
收藏 4.88MB PPTX 举报
### 汇川机器人动态跟随应用知识点解析
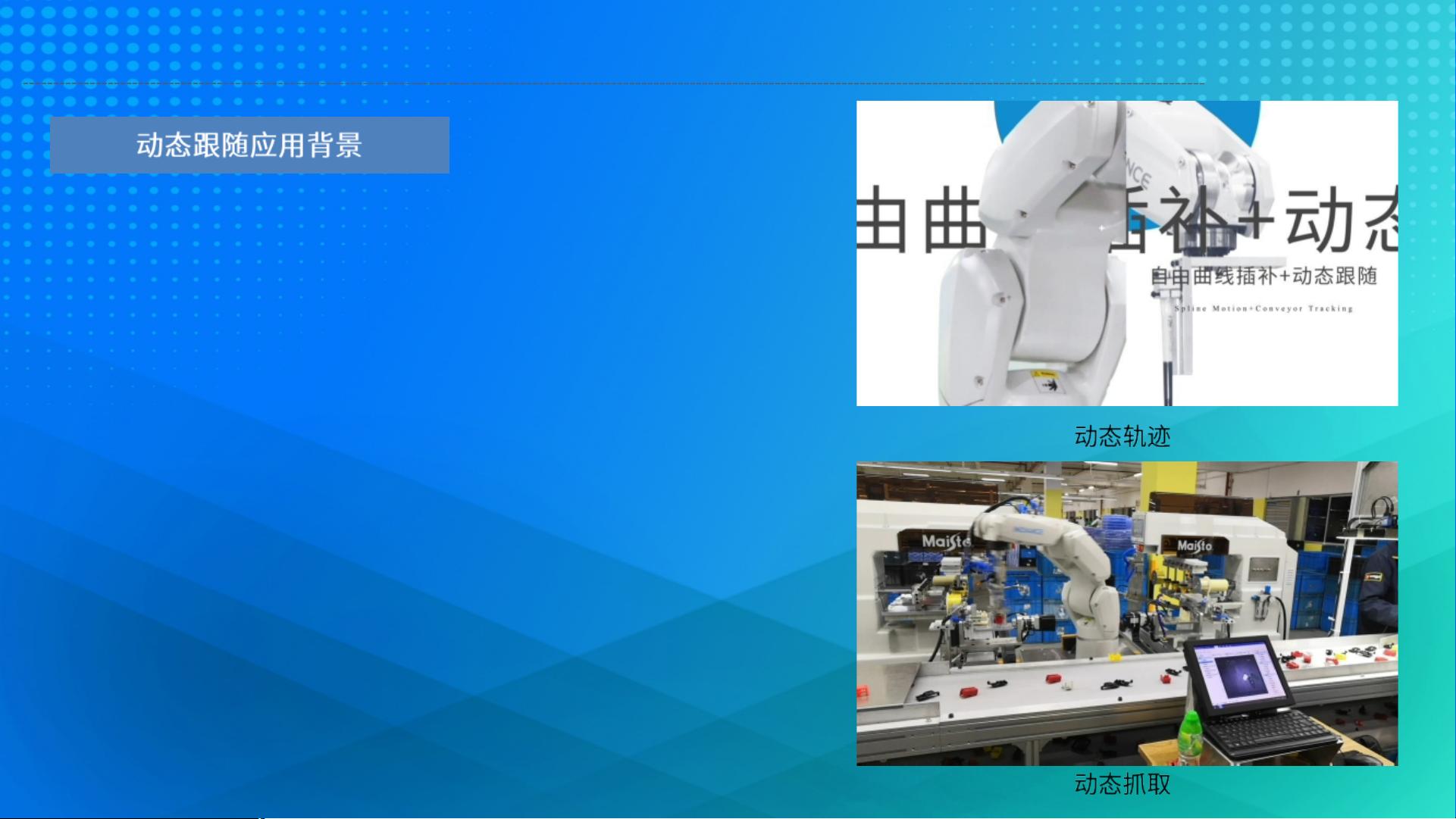
#### 一、动态跟随应用概述
1. **定义**: 动态跟随是指机器人实时跟踪移动物体的技术,它以移动物体为参考坐标系,实现轨迹和点位运动。
2. **应用场景**: 主要应用于流水线或皮带线上的作业场景,例如物料的抓取、上下料、分拣和摆盘等任务。特点在于流水线无需停止运行,机器人可以跟随流水线的动作执行任务,从而达到生产线效率和机器人动作的最优化。
3. **应用拓展**: 除了基础的动态跟随外,还包括动态涂胶、动态点焊以及3D涂胶等高级应用形式。
4. **技术特点**:
- **传送带类型**: 支持直线、圆盘等类型。
- **传送带数量**: 最多可配置4条,但同时只能使用2条。
- **检测方式**: 可采用视觉传感器或光电传感器,但仅支持单一视觉检测。
- **跟随指令**: 支持`MovL`、`MovC`和`JumpL`等运动指令。
- **工件种类**: 同一条传送带上最多可以设置16种不同类型的工件。
- **视觉数据**: 支持机器人坐标或像素坐标的视觉数据类型。
- **物体数量**: 单次拍照最多可以识别10个物体。
- **物体存储**: 物体存储队列的最大长度为500个。
- **视觉通讯格式**: 固定格式,如`TA,X1,Y1,A1,T1,TA,X2,Y2,A2,T2...`。
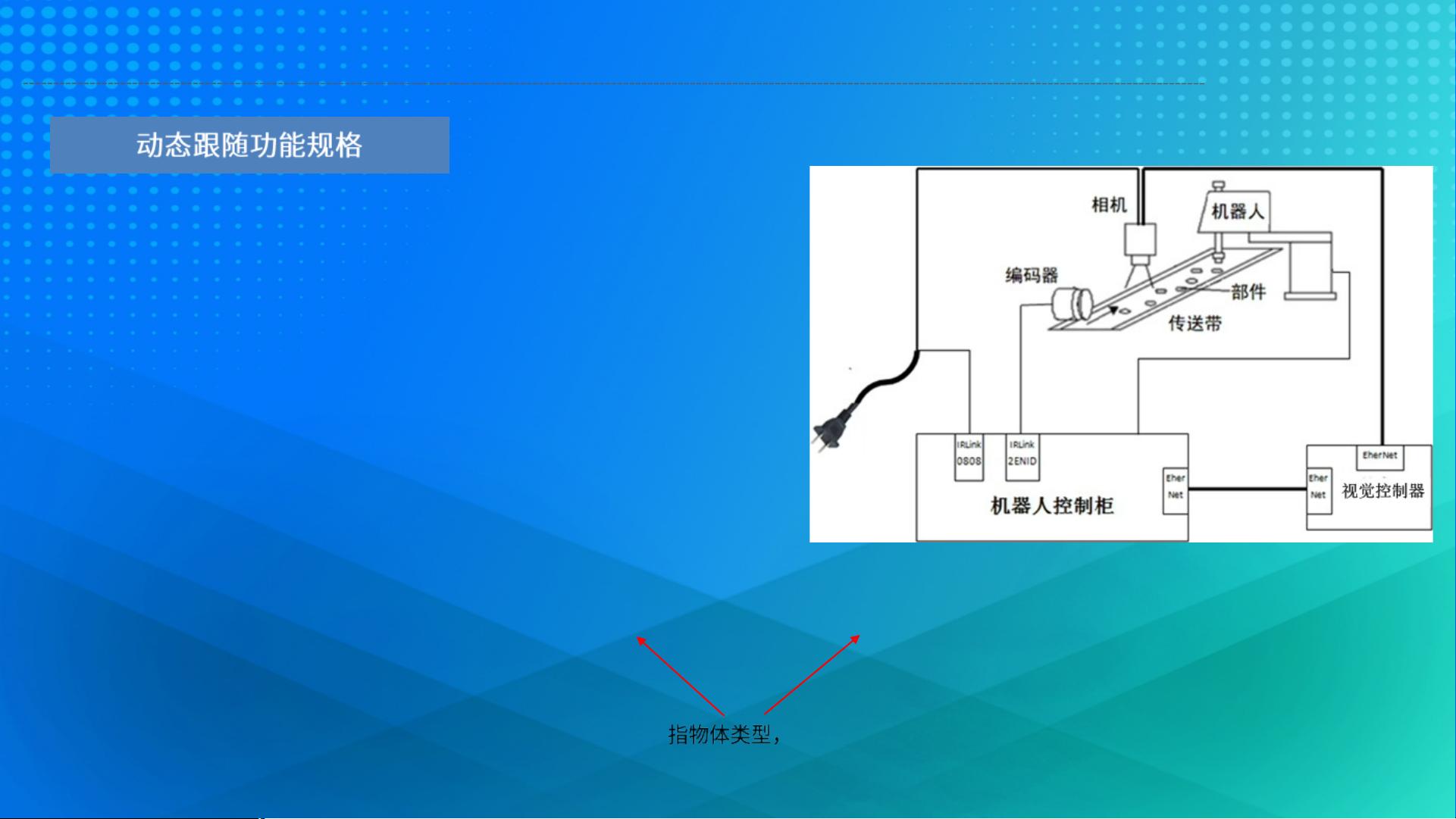
5. **硬件组件**:
- **机器人主体**: 包括机器人本体及电控柜。
- **采集卡**: IRCB-2ENID-BD 2通道差分脉冲输入采集卡。
- **编码器**: ABZ差分编码器,使用5V电压供电。
- **编码器附件**: 编码器摩擦轮与安装支架适用于异步传送带,而编码器联轴器则适用于同步带。
- **视觉系统/信号传感器**: 用于检测物体位置和运动状态。
- **标定工具**: 标定板与标定针等工具用于确保系统的准确性。
6. **注意事项**:
- 编码器的屏蔽线必须接地以提高抗干扰能力,否则可能会影响抓取精度。
- 编码器线缆应避免接头,如有必要,则需确保接头牢固并焊接屏蔽线。
#### 二、动态跟随的基本原理
1. **坐标系介绍**:
- **物体坐标系(Oobj)**: 随物体移动的动态坐标系,描述物体在传送带上的位置和方向。
- **传送带坐标系(Ocny)**: 描述传送带与机器人之间的相对关系,是一个静态坐标系。
- **视觉坐标系(Ovis)**: 描述相机与传送带之间的位置转换关系,通过相机获取物体的瞬时位置。
2. **工作流程**:
- **检测**: 通过视觉或光电传感器获取物体位置信息,并将其放入传送带对象队列中;利用编码器实时反馈物体位置变化。
- **跟随**: 通过编程指令实现在移动物体参考坐标系下的工作流程。
#### 三、动态跟随应用操作方法
1. **直线跟随整体流程**:
- **光电传感器检查**: 触发传感器并通过示教器监控界面查看对应的DI是否发生变化。
- **编码器检查**: 移动传送带并检查分辨率标定界面中编码器脉冲值是否发生变化。
- **视觉触发检查**: 在示教器监控界面强制输出DO,观察是否触发拍照。
- **视觉通信检查**: 在示教状态下使用TCP助手与视觉通信,运行状态下通过后台查看是否接收到视觉数据。
2. **坐标系建立**:
- **工具坐标系**:
- 与视觉标定时,以机器人末端戳点的针尖建立工具坐标系,并在标定前激活该坐标系。
- 正常应用时,以机器人末端抓取物体的工具来建立工具坐标系。
- 建立完成后,在工具坐标系下进行旋转验证精度。
- **用户坐标系**:
- 如果机器人与皮带的相对位置发生变化,需要重新建立用户坐标系。
- 为提高精度,建议选取的三个点尽可能分散。
3. **跟随工艺设置**:
- **传送带参数设置**:
- 包括基本参数、编码器校准、工件高度校准、边界参数设置和检测参数设置。
- 检测参数设置根据不同的检测方式(视觉或传感器)有所不同。
- 设置过程中,为了避免误操作导致参数丢失,每次设置完毕后需要点击【保存】按钮保存设置。
汇川机器人的动态跟随技术不仅能够有效提升流水线作业效率,还能适应多种复杂的应用场景,为工业自动化提供强有力的支持。通过对上述内容的理解与掌握,可以更好地运用此技术于实际生产中。


资源评论


m0_62672346
- 粉丝: 2
- 资源: 4









最新资源
- 毕设和企业适用springboot企业数据管理平台类及跨平台数据交换系统源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及企业协作平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及企业管理智能化平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及情感分析平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及市场调查平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及社交媒体平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及视频内容分发平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及视频编辑平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及视频内容管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及视频直播系统源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及行业资讯平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及消费品管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及员工管理平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及虚拟银行平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及在线学习平台源码+论文+视频.zip
- 毕设和企业适用springboot企业数据管理平台类及直播流媒体平台源码+论文+视频.zip
