1
ESP 案例——carsim 与 simulink 联合仿真
1 控制目标
2)识别驾驶员转向意图、识别车辆过度还是不足转向;
3)能独立调节制动力矩,产生附加横摆力矩,
4)适应复杂的路面条件,
5)运行工况:加速、制动、转向稳定性行驶 5)车辆系统集成的影响
2 控制量
横摆角速度
质心侧偏角
3 控制算法
逻辑门限值
状态误差反馈
PID
模糊 PID
ESP 功能开发
功能模块划分
IO
ESP Input
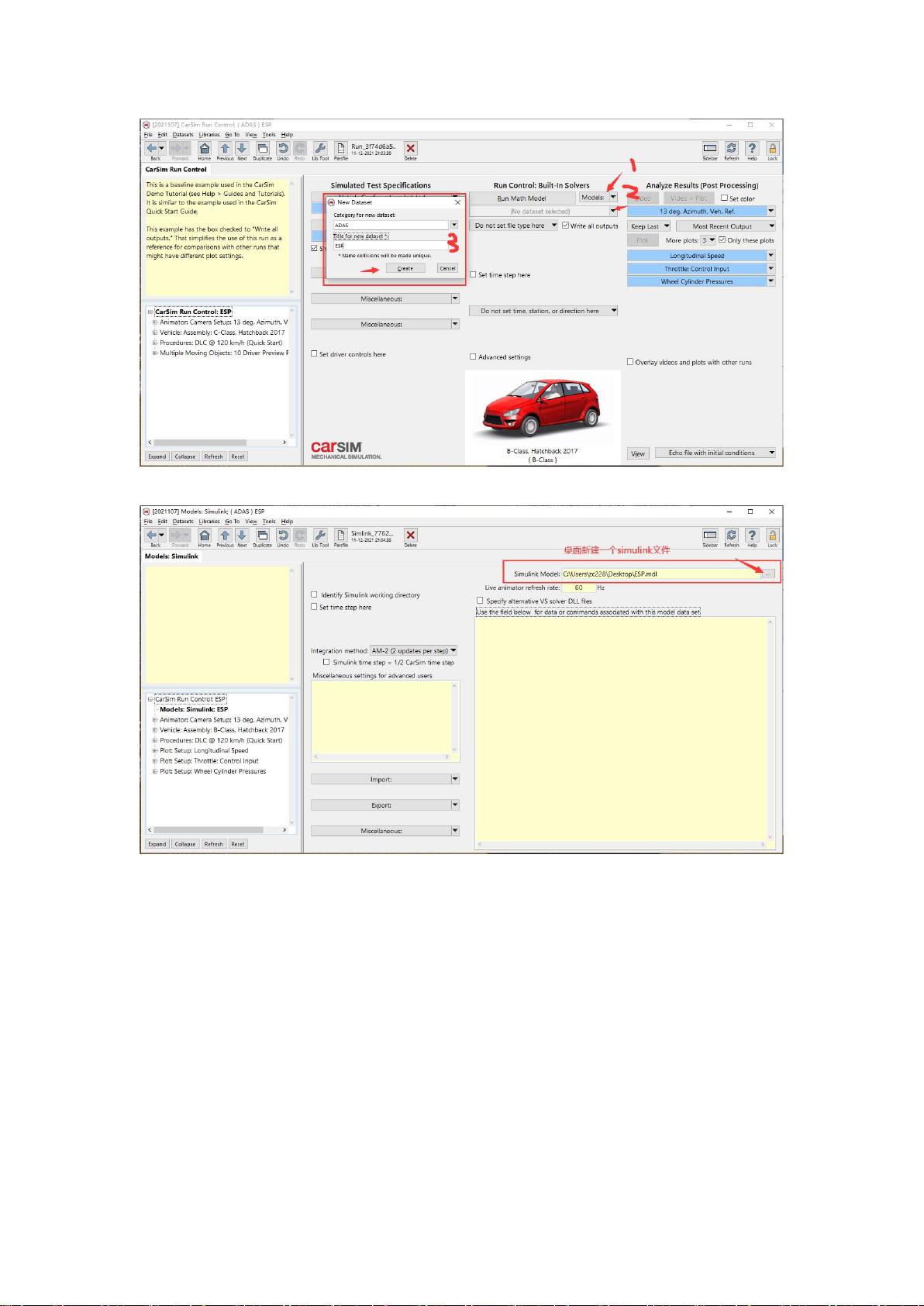
Simulink 输入到 CarSim 的量车辆的控制量
车辆的四个轮缸压力
ESP Output
车速
轮速
主缸压力