自动控制原理(第2版)(余成波-张莲-胡晓倩)习题全解及matlab实验第6章习题解答.pdf
版权申诉
56 浏览量
2022-11-12
11:46:43
上传
评论
收藏 2MB PDF 举报


第 6 章
控制系统的校正
本章主要讨论利用频率法对单输入-单输出的线性定常系统的综
合和设计。在介绍控制系统校正的基本概念、控制系统的基本控制规
律的基础上,介绍了各种串联校正装置(超前校正装置、滞后校正装
置、滞后-超前校正装置)的特性及按分析进行相应设计的基本步骤
和方法;还介绍了期望设计法的基本概念、常见的期望特性和设计步
骤;另外还介绍了根轨迹法的串联校正和反馈校正的基本概念和方
法;最后介绍了利用 MATLAB 进行控制系统校正。
教材习题同步解析
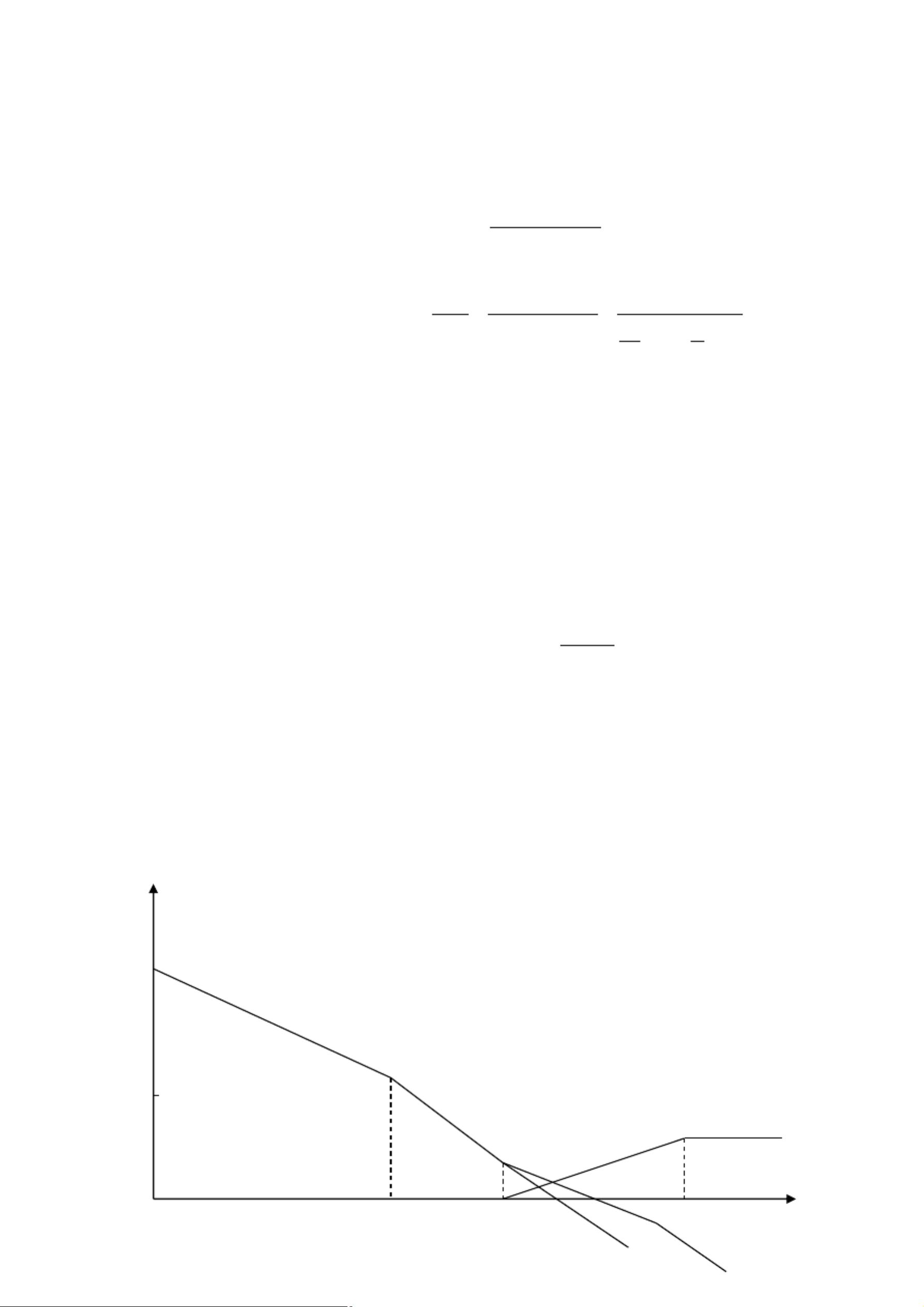
试分别说明系统的固有频率特性与系统期望频率特性的概念。
答:系统本身固有元件所具有的频率特性称为固有频率特性。设
计者希望系统所能达到的频率特性称为系统期望频率特性。
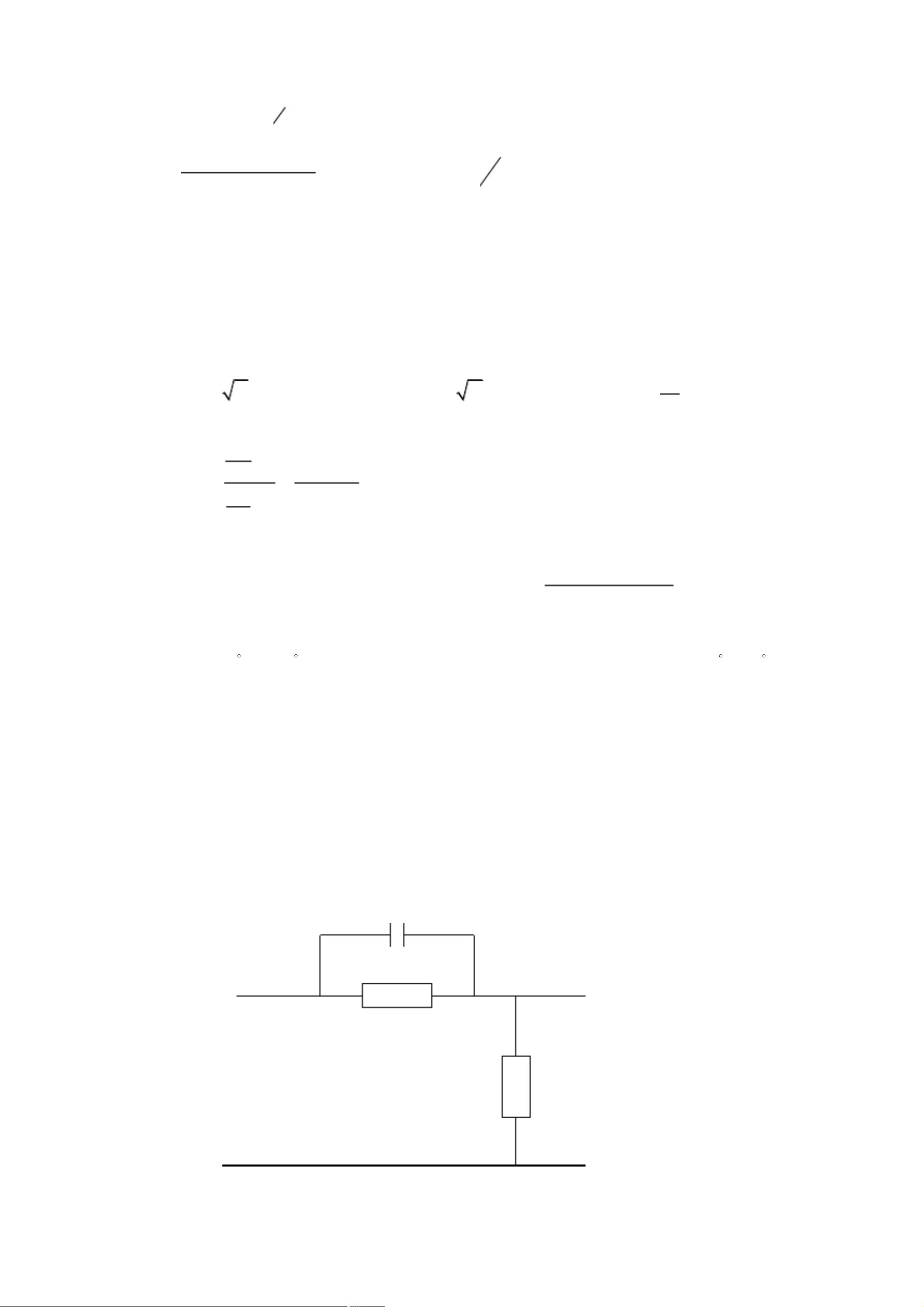
试比较串联校正和反馈校正的优缺点。
答:a、校正装置和未校正系统的前向通道环节相串联,这种叫
串联校正,串联校正是最常用的设计方法,设计与实现比较简单,通
常将串联装置安置在前向通道的前端。
b、并联校正也叫反馈校正,它是和前向通道的部分环节按
反馈方式连接构成局部反馈回路,设计相对较为复杂。并联校正一般

剩余45页未读,继续阅读
资源评论


春哥111
- 粉丝: 1w+
- 资源: 5万+









最新资源
- 论文(最终)_20240430235101.pdf
- 基于python编写的Keras深度学习框架开发,利用卷积神经网络CNN,快速识别图片并进行分类
- 最全空间计量实证方法(空间杜宾模型和检验以及结果解释文档).txt
- 5uonly.apk
- 蓝桥杯Python组的历年真题
- 2023-04-06-项目笔记 - 第一百十九阶段 - 4.4.2.117全局变量的作用域-117 -2024.04.30
- 2023-04-06-项目笔记 - 第一百十九阶段 - 4.4.2.117全局变量的作用域-117 -2024.04.30
- 前端开发技术实验报告:内含4四实验&实验报告
- Highlight Plus v20.0.1
- 林周瑜-论文.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


