动态规划是一种用于解决多阶段决策问题的数学方法,它源于运筹学,广泛应用于计算机科学、经济学、工程学等多个领域。动态规划的核心思想是将复杂的问题分解为一系列较小的子问题,通过解决这些子问题来逐步构建全局最优解。在这个过程中,每个阶段的决策不仅要考虑当前阶段的利益,还要兼顾未来阶段的影响,以确保整体的最优效果。
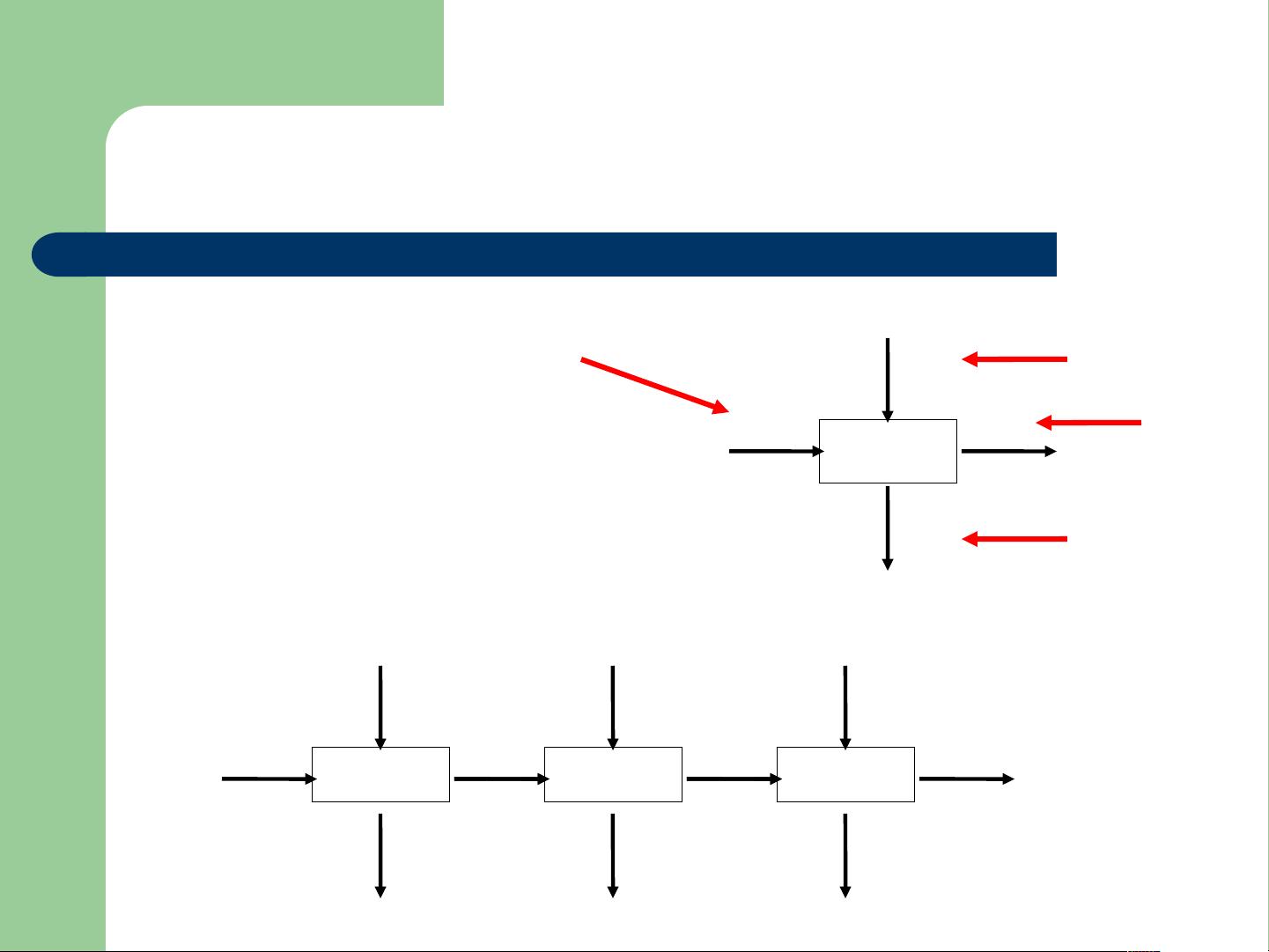
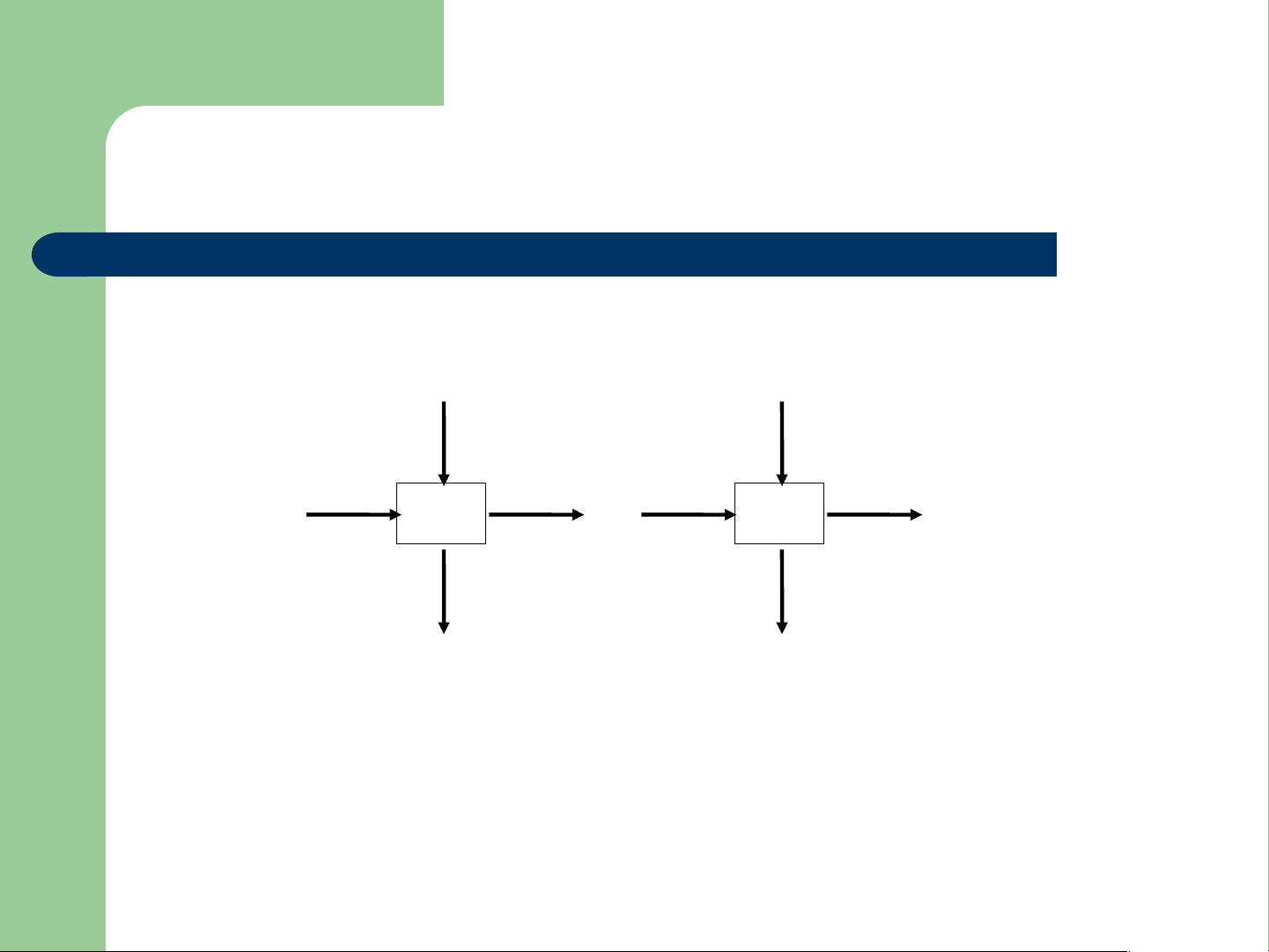
我们要明确动态规划的基本概念。在动态规划问题中,我们面对的是一个多阶段决策过程,每个阶段都有一个决策变量(uk),对应于在该阶段做出的决策。阶段变量(k)用来区分决策的不同时间点。每个阶段的状态变量(xk)描述了在该阶段开始时系统所处的状态。阶段效应(rk)则表示从状态xk出发,执行决策uk后产生的结果。
无后效性是动态规划的关键特性,意味着后续阶段的决策只依赖于当前阶段的状态,而不受之前决策的影响。这简化了解决过程,使得我们可以逐阶段优化决策,而不必考虑历史决策。如果一个过程满足无后效性,那么它就是一个具有无后效性的多段决策过程。
动态规划模型的建立包括以下步骤:
1. 确定阶段和阶段变量:阶段划分通常基于时间或空间的顺序,阶段变量k表示决策的顺序。
2. 定义状态变量和状态可能集合:状态变量包含了确定所有决策所需的信息,状态可能集则规定了状态的约束条件。
3. 确定决策变量和决策允许集合:决策变量反映了所做的决策,决策允许集合限定了决策的范围。
4. 明确状态转移方程:描述系统如何从一个状态转移到另一个状态,即xk+1 = Tk(xk, uk)。
5. 确定阶段效应和目标:阶段效应是每个决策的结果,目标函数通常是阶段效应的集结,可能是求最大值或最小值。
动态规划的解包括最优目标值(R*)、最优策略和最优路线。最优策略是一系列决策,使得目标函数达到最优;最优路线是遵循最优策略时系统经过的状态序列。动态规划最优性原理指出,最优策略的一个性质是,无论初始状态和决策如何,对于任何前一阶段的状态,剩余决策序列都应构成最优策略。
动态规划提供了一种系统化的方法来解决多阶段决策问题,通过分治策略保证整体的最优解。在实践中,正确建模和理解动态规划模型对于找到最佳决策路径至关重要。