
第二章 机构的结构分析
2.1 机构结构分析的内容及目的
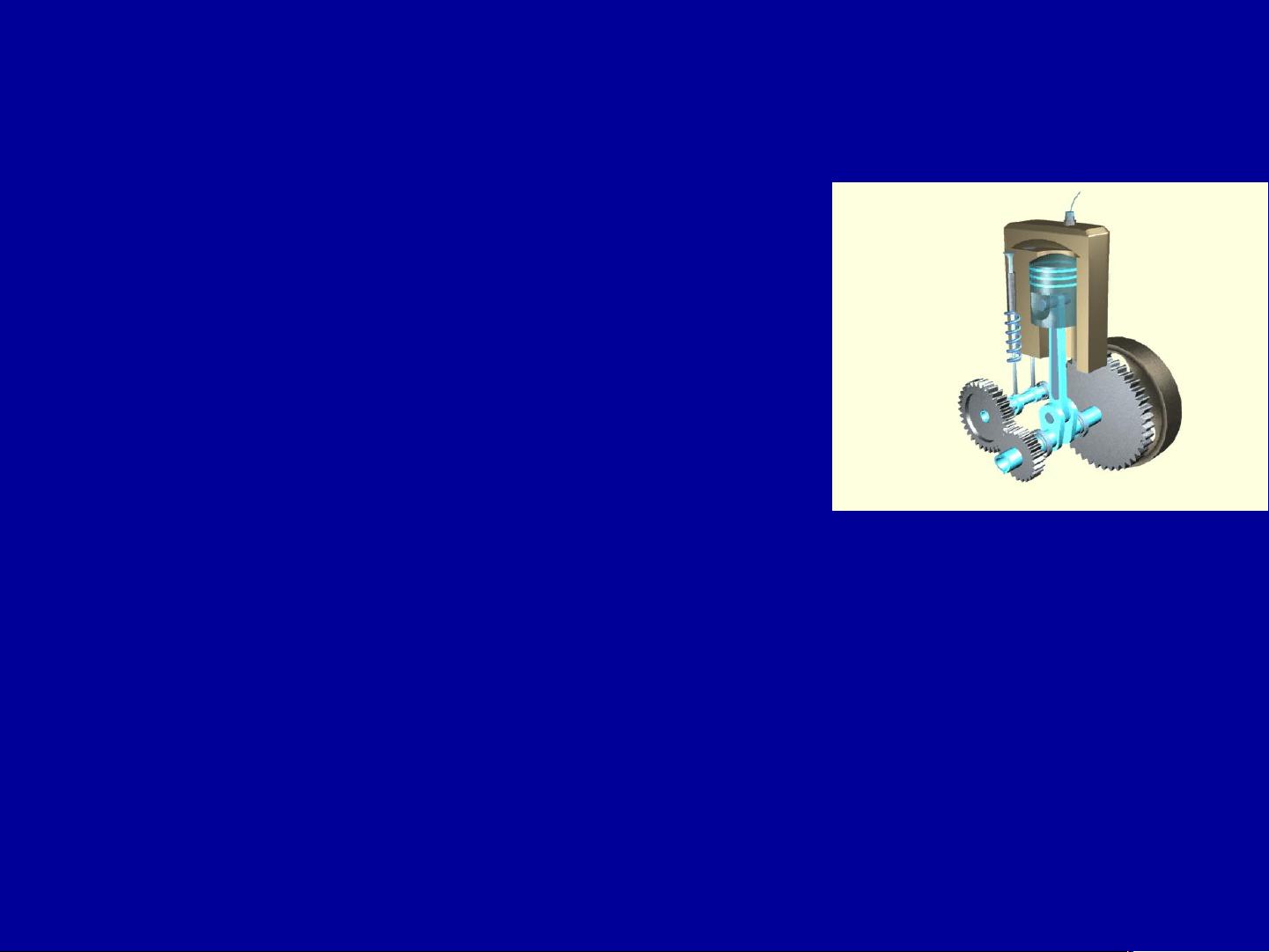
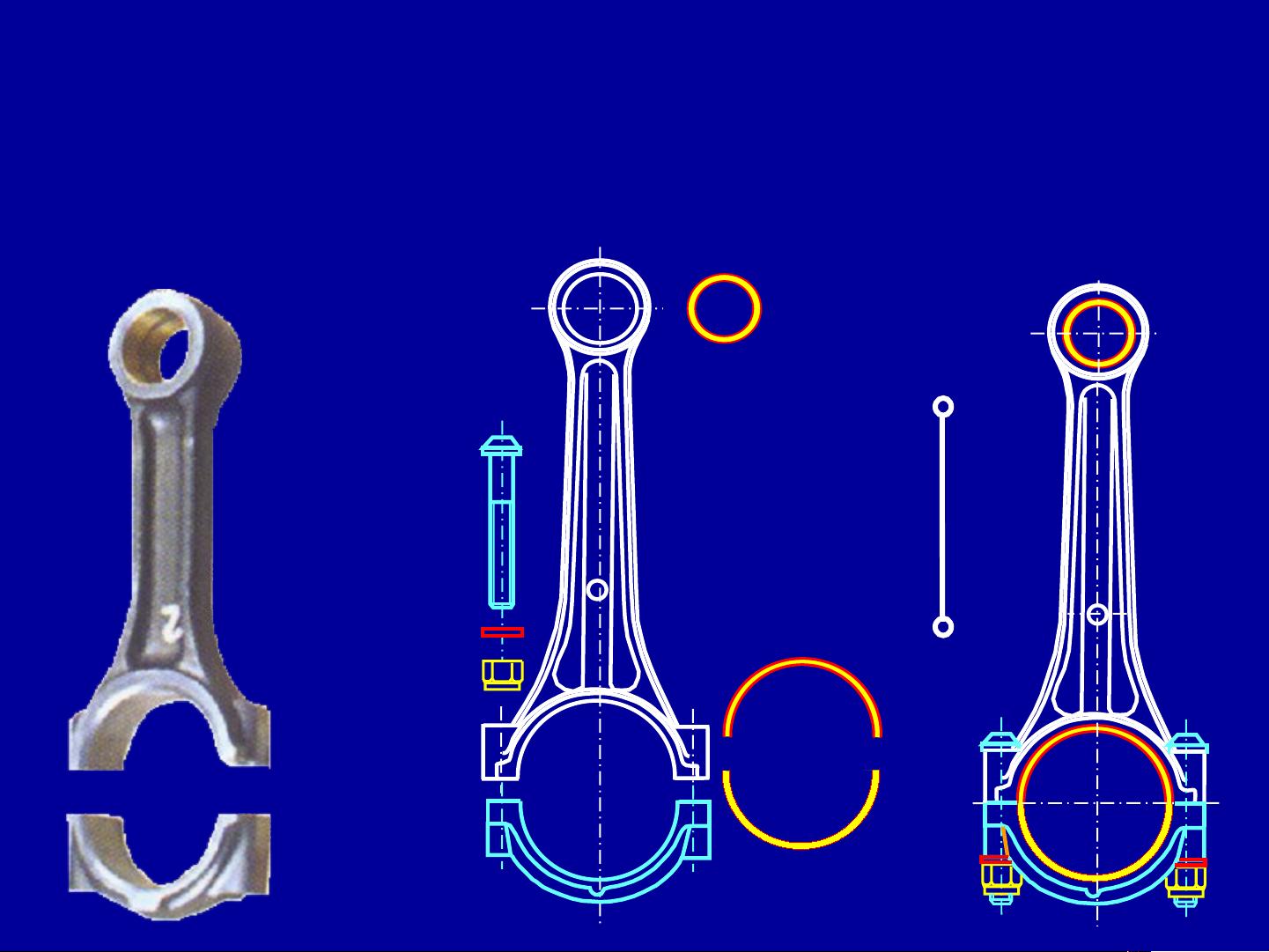
2.2 机构的组成
2.3 机构运动简图
2.4 机构具有确定运动的条件
2.5 机构自由度的计算
2.6 计算平面机构自由度时应注意的事项
2.7 平面机构组成原理、结构分类及结构分析
剩余63页未读,继续阅读
资源评论


m0_62049925
- 粉丝: 0
- 资源: 22万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


