



—Recent advances in technology have increased
the**capability of mobile platforms while
decreasing the cost. It hasbecome more feasible to
deploy a team of agents to cooperativelyaccomplish
an objective. While multi-agent systems
provideadvantages, including lower cost and
robustness to failure, thereis a need for additional
study of principles for the design andtest of these
decentralized systems. The main contribution of
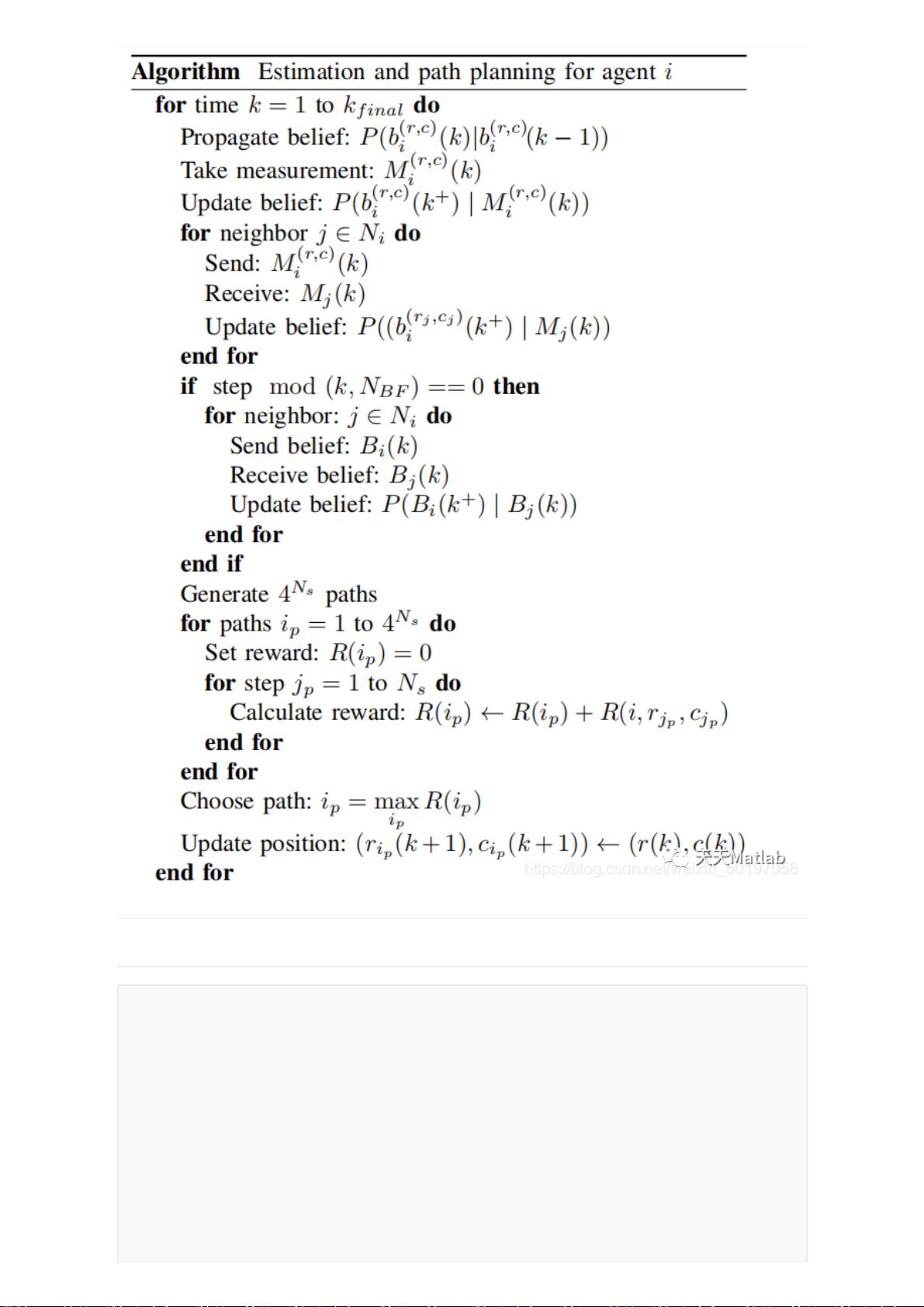
thispaper is a novel estimation and path planning
algorithm thatcan be used for improved estimation
of uncertain environments.The estimation
algorithm utilizes Bayesian fusion,
measurementsharing on a graph, and belief
consensus. One new componentof this approach is
the reward-based path planning algorithmthat
incentivizes agents to collect the best local
informationas well as improve coverage of the
environment. When agentsplan paths to collect
more valuable information, the estimationerror is
reduced. This approach is studied for the
applicationof estimating the state of a forest fifire
but can be applied inmany domains. Simulations
were performed to demonstrate theeffectiveness of
the algorithm compared to other approaches**
2 部分代码
import java.util.LinkedList;
tic
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
ENV_SIZE = 20; % Size of environment
formation = 1; % 0 -> strong, 1 -> ring, 2 -> random
rand_comm = 3; % Num of random UAVs to connect with
depth = 3; % Depth of our tree
branch_factor = 4; % Number of childs per node (N,S,E,W)
num_of_agents = 5; % Number of UAVs simulated
fire_rate = 0.007; % Fire spread rate (0 <= rate <= 1)
burn_out_rate = 0; % Fire burnout rate (0 <= rate <= 1)













